A motion prediction method for target points on the surface of the heart based on spatio-temporal correlation
A spatiotemporal correlation, heart surface technology, applied in image data processing, instruments, calculations, etc., can solve problems such as increased prediction error, achieve accurate prediction results, high prediction accuracy, and improve prediction accuracy and robustness.
Active Publication Date: 2018-06-12
UNIV OF ELECTRONICS SCI & TECH OF CHINA
View PDF5 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0006] The purpose of the present invention is to overcome the deficiencies of the prior art, to provide a method for predicting the motion of target points on the surface of the heart based on spatio-temporal correlation, which utilizes the spatial correlation between the target point and its surrounding auxiliary points to solve the long-term span prediction, while reducing the The problem of sharply increasing forecast errors
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment
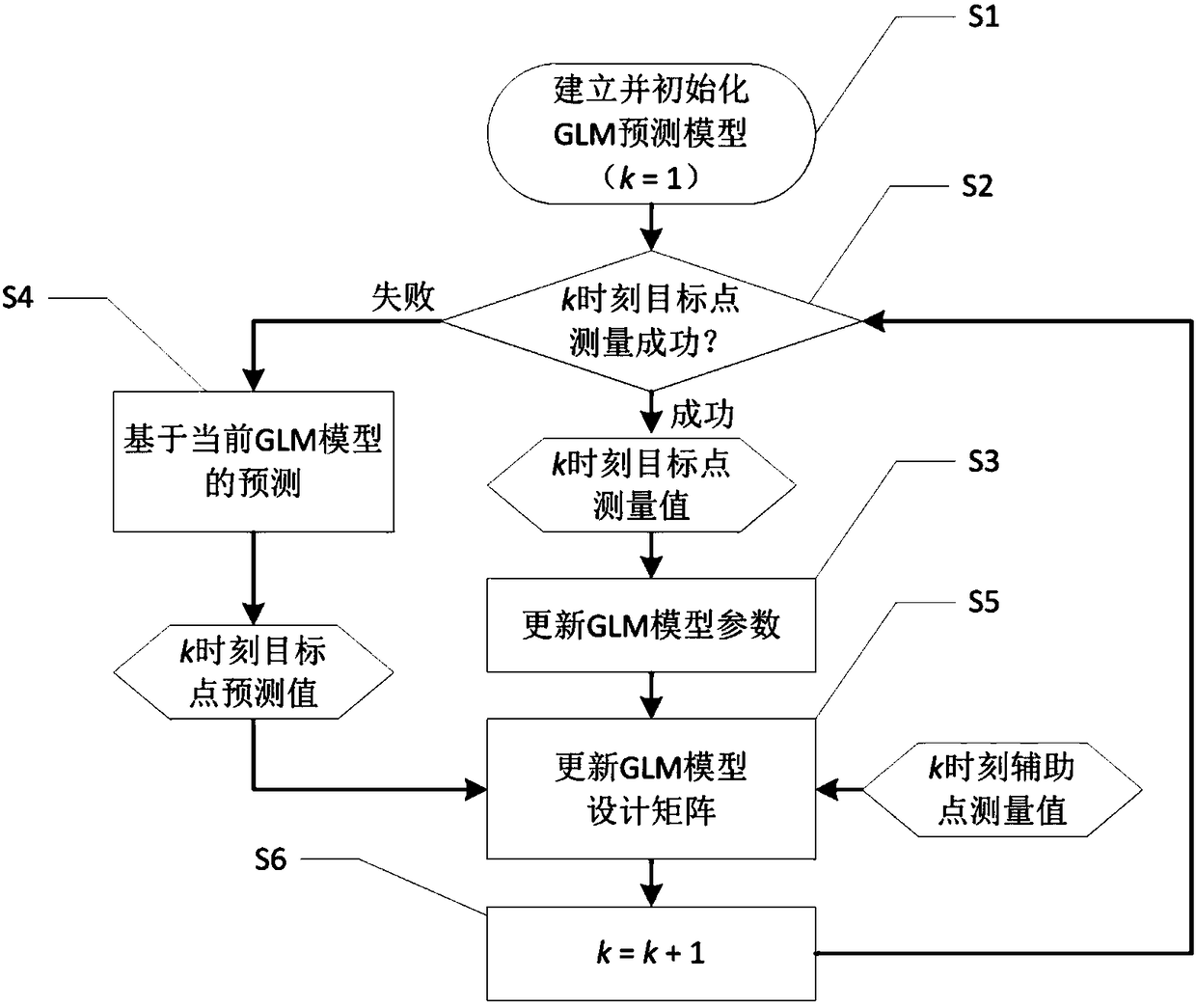
[0038] The present invention uses the temporal autocorrelation of the movement of the target point on the surface of the heart and the spatial correlation with the surrounding auxiliary points to predict the future movement of the target point. The predicted result can be used to accurately determine the position of the target point when the measurement system fails. Estimate, or use predictive control of surgical robot manipulator.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a method for predicting the movement of target points on the surface of the heart based on temporal-spatial correlation, which utilizes the temporal autocorrelation of the target point's motion track on the surface of the heart and the spatial correlation with surrounding auxiliary points to establish the linearity of the predicted target point. The model GLM, based on the current GLM model, obtains the predicted value, thus solving the problem of a sharp increase in the forecast error due to the weakening of the temporal autocorrelation during long-term forecasting.
Description
Technical field [0001] The present invention belongs to the technical field of motion prediction, and more specifically, relates to a method for predicting the motion of a target point on the heart surface based on spatio-temporal correlation. Background technique [0002] In recent years, robotics technology has been increasingly used in the field of minimally invasive surgery to reduce the pain of patients, reduce the work intensity of surgeons, improve surgical accuracy and reduce surgical difficulty. Research institutions around the world are actively carrying out research on robotic assisted surgical techniques. The clinical application of many advanced robot-assisted surgery technologies needs to be based on the precise positioning of target points on the surface of surgical organs. [0003] In the prior art, the robot-assisted "heartbeat synchronization" technology in cardiac surgery requires real-time tracking of the movement of the target point on the surface of the heart...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Patents(China)
IPC IPC(8): G06T7/00G06T7/246
CPCG06T7/0012G06T2207/10016G06T2207/30048
Inventor 杨波郑文锋刘珊谢建军
Owner UNIV OF ELECTRONICS SCI & TECH OF CHINA