

Long-term fixed-point observation type underwater robot with three-body configuration
An underwater robot and fixed-point observation technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of poor economy, weak fixed-point continuous observation ability, short self-sustaining time, etc., and achieve the maturity of structure and processing technology High, self-balanced fixed-point hovering, lifting ability and level effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
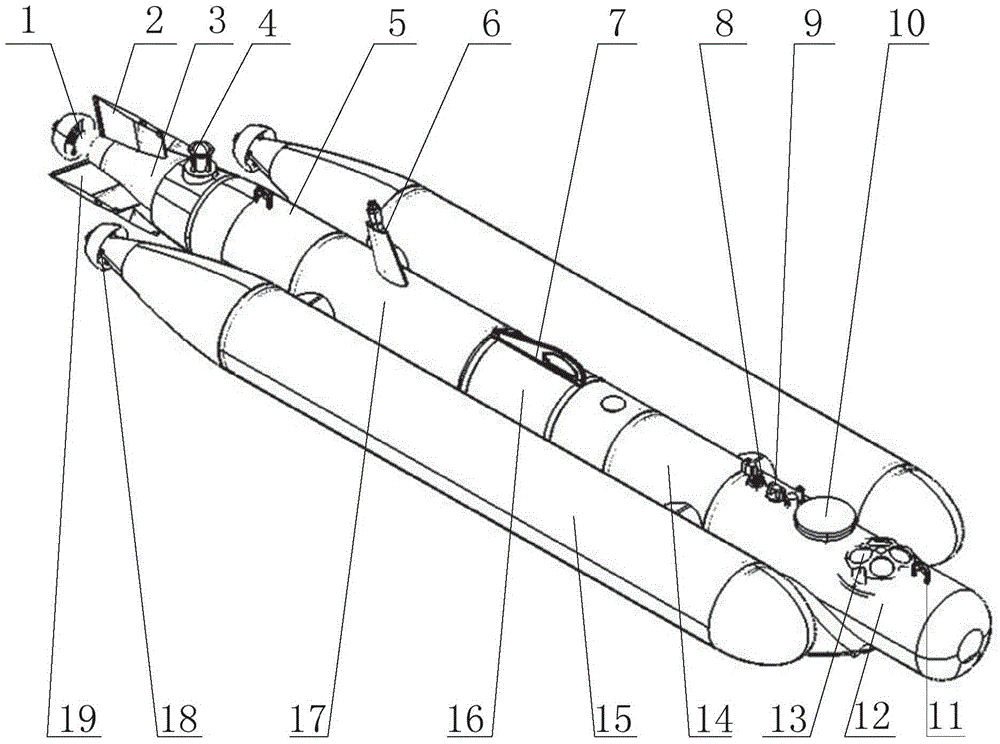
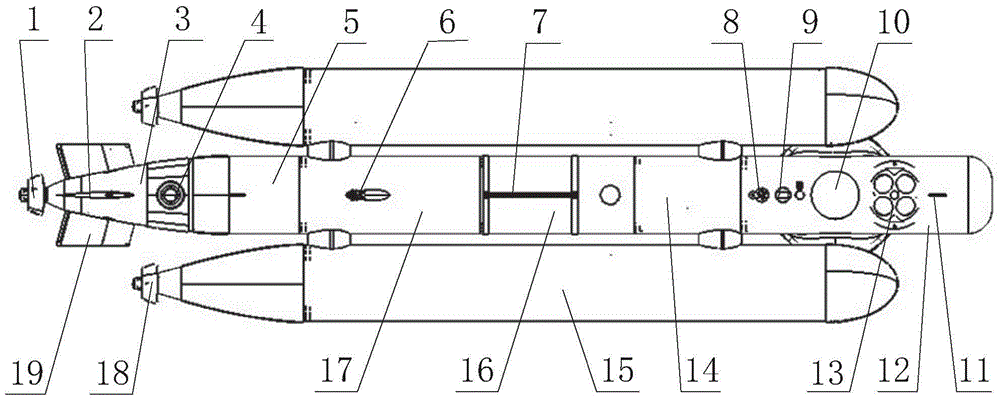
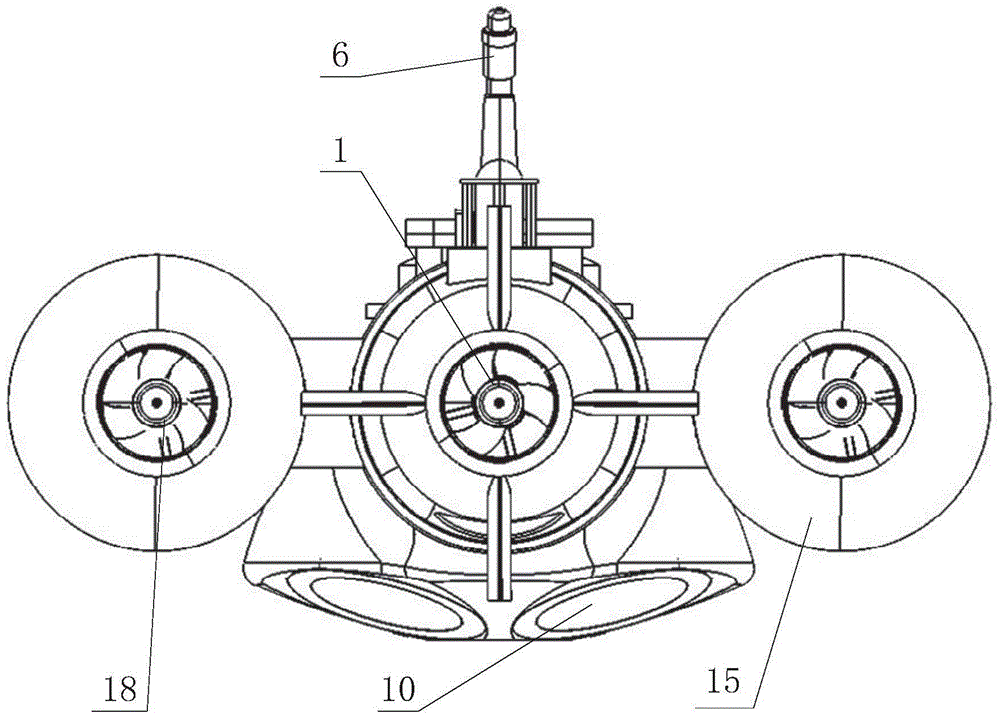
[0035] Such as Figure 1-7 As shown, the present invention includes a main body and two appendages 15 symmetrically arranged on both sides of the main body. The main body adopts a segmented modular design, including a propulsion section 3, a stern buoyancy adjustment section 5, and a battery compartment of the main body connected in sequence. Section 17, electronic cabin section 16, bow buoyancy adjustment section 14, and observation load section 12, wherein the observation load section 12 adopts an open frame structure, and the observation load section 12 is equipped with sensing equipment for ocean hydrological data observation. The propulsion section 3 adopts a partially closed open structure. The stern buoyancy adjustment section 5, the main battery cabin section 17, the electronic cabin section 16 and the bow buoyancy adjustment section 14 are arranged i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More