

A high-precision trajectory tracking control method for a model-uncertain dual-joint manipulator
A trajectory tracking and manipulator technology, applied in the field of variable universe fuzzy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
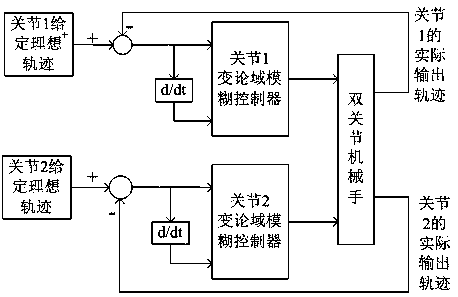
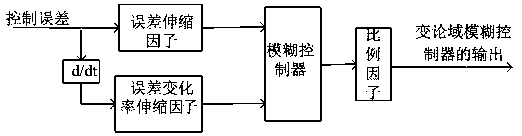
[0010] figure 1 In the variable universe fuzzy control block diagram of the dual-joint manipulator shown, the controlled object is a dual-joint manipulator, so two variable universe fuzzy controllers with the same structure are used to control the trajectory tracking of the two joints respectively. For multi-joint manipulators, the number of controllers can be determined according to the number of joints, and each joint needs one controller. The variable universe fuzzy controller adopts a two-dimensional fuzzy controller with double input and single output, in which the input variables are the deviation and the rate of change of the deviation, and the output variable of the controller is the control torque of the manipulator joints.
[0011] figure 1 The double-joint manipulator in , its dynamic model is:
[0012]
[0013] where q∈R n is the joint angular displacement, M(q)∈R n×n is the inertia matrix of the manipulator, Represents centrifugal force and Coriolis force...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More