

A tracking method for a moving frogman
A frogman and motion technology, applied in the field of target state estimation, can solve the problems of low tracking accuracy and poor stability, and achieve the effects of high tracking accuracy, strong stability, and improved operating speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
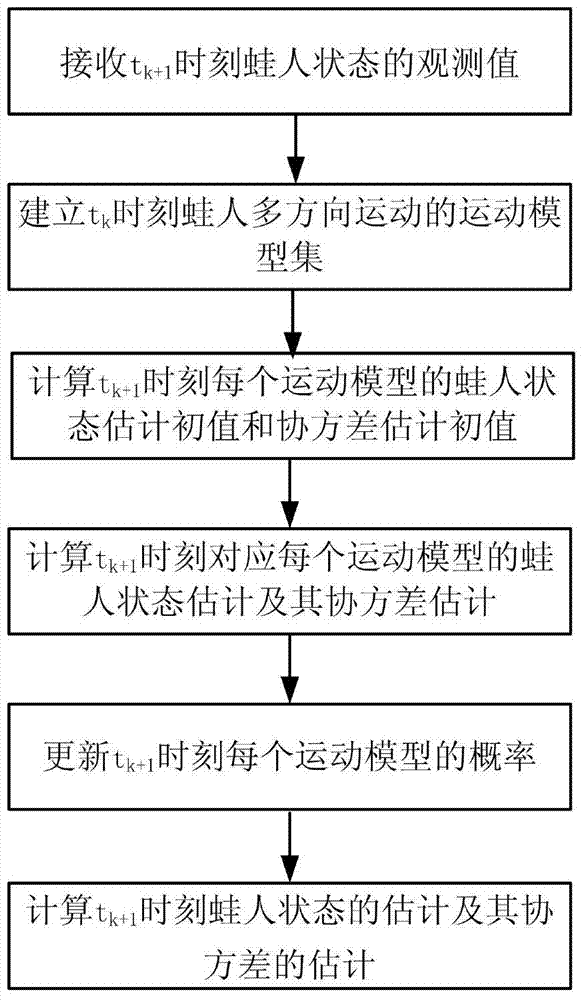
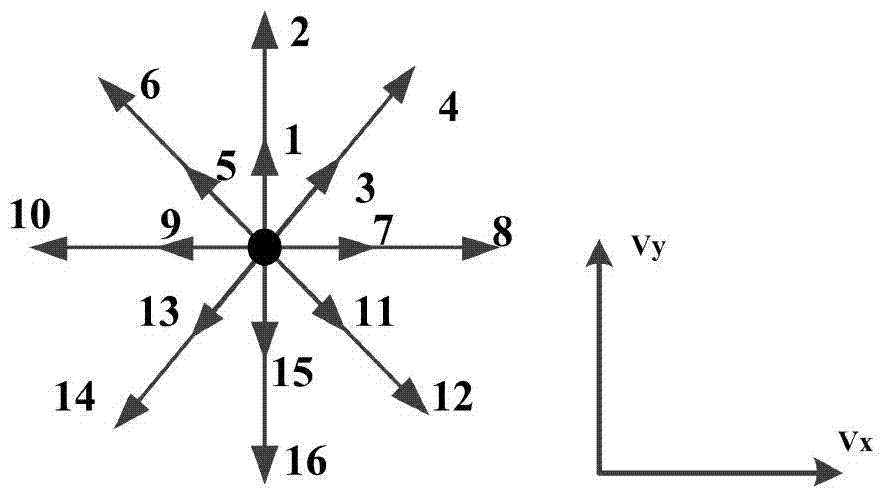
[0055] Based on the comprehensive analysis of the characteristics of the frogman's movement, the present invention establishes a multi-directional motion model set describing the frogman's motion, and integrates the motion model set into an interactive multi-model (IMM) algorithm, and utilizes multiple groups of parallel filter estimation The method realizes the state estimation of the frogman under the multi-directional motion model, and finally, according to the updated model probability, the estimation results of each model are fused to complete the state estimation of the frogman.
[0056] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0057] The method of the present invention is based on the assumption that the frogman moves in a two-dimensional plane, ignoring the height information.
[0058] like figure 1 Shown, a kind of tracking method of sports frogman, described method comprises:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More