

Serial multi-mode brain control method for smooth grabbing operation of artificial hand
A multi-modal, prosthetic hand technology, applied in the field of intelligent robots, to achieve the effect of reducing the misoperation rate and improving the information transmission rate and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
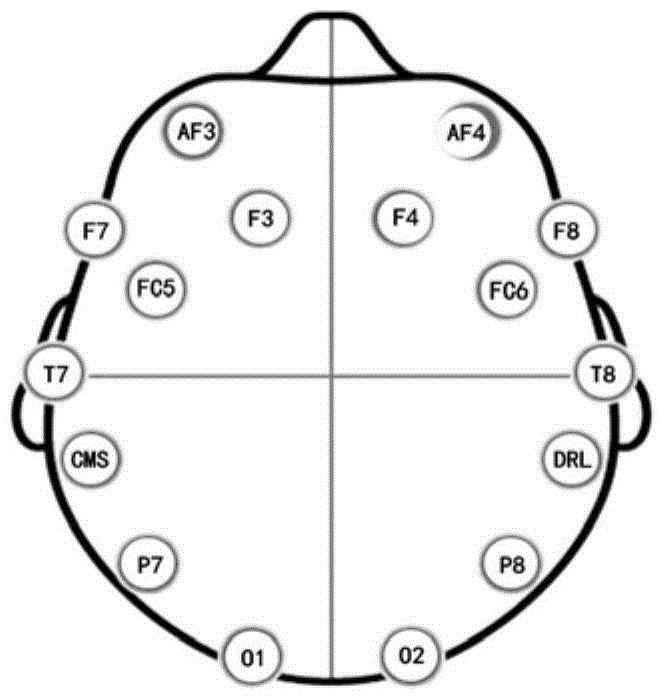
[0030] refer to figure 1 , Figure 4 (b), figure 1 In the experiment, the EEG signals of the O1 and O2 positions in the occipital lobe area of the subject's head and the F7 and F8 positions in the lateral frontal cortex area were collected, and the reference electrodes were placed behind the ears on both sides. The present invention relates to a serial multi-modal brain control device for compliant grasping operation of a prosthetic hand, which includes an EEG signal acquisition module 310 placed on the subject's head, and a scene animation visual induction module 370 placed in front of the subject. Prioritize the use of portable 16-channel wireless EEG acquisition equipment, and select the EEG signals at the O1 and O2 positions in the occipital lobe area and the F7 and F8 positions in the lateral frontal cortex area under the international standard...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More