System of matching somatosensory operation to realize virtual flight
A somatosensory and action technology, applied in the field of virtual flight systems, can solve the problems of poor playability and simple operation of drones, and achieve the effect of a good flight experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
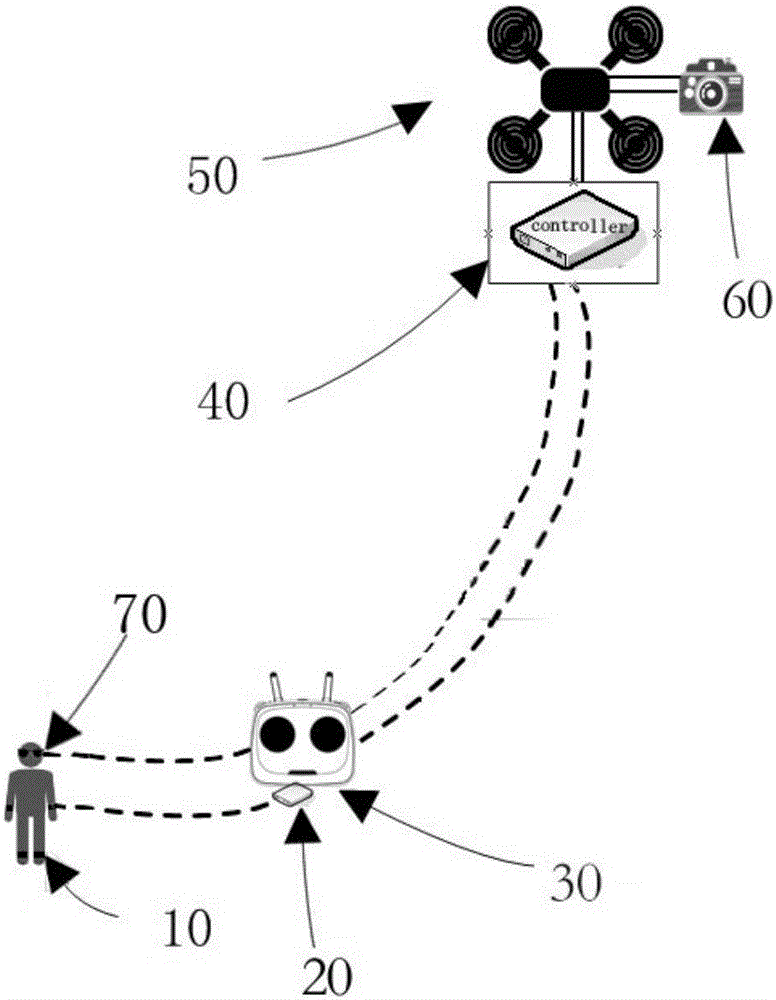
[0024] Such as figure 1 As shown, the system for realizing virtual flight with somatosensory operation provided by this embodiment includes wearable sensor 10, remote controller 30, drone 50, and visual device 70, wherein the drone 50 is provided with drone control 40, and the drone 50 is equipped with a panoramic camera 60, the remote controller 30 is provided with a command converter 20, all commands and data can be transmitted bidirectionally, the solid line in the figure is the internal line transmission channel, and the dotted line is wireless transmission channel. in,
[0025] The wearable sensor 10 is worn on various parts of the human body, and is used to sense the motion and trend of various parts of the human body, and output corresponding motion data values;
[0026] The command converter 20 is used to receive the motion data value and convert it into a flight command recognizable by the drone;
[0027] The UAV controller 40 is used to receive the flight instruct...
Embodiment 2
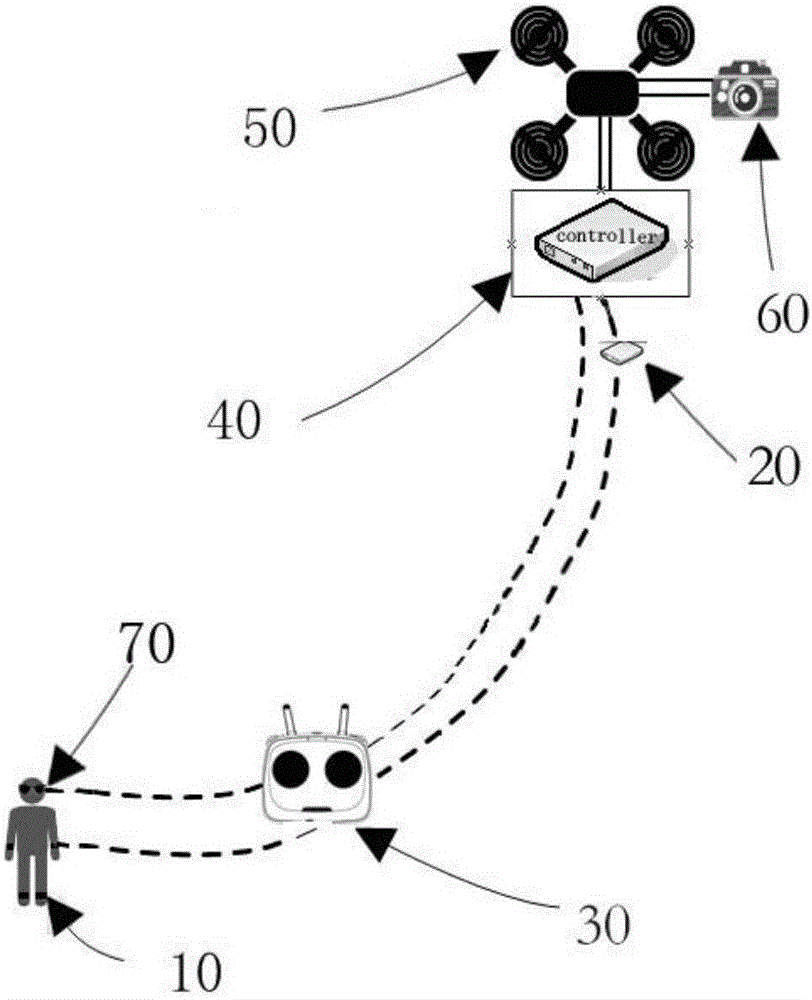
[0038] Such as figure 2 As shown, the system for realizing virtual flight with somatosensory operation provided by this embodiment includes wearable sensor 10, remote controller 30, drone 50, and visual device 70, wherein the drone 50 is provided with drone control device 40, and a panoramic camera 60 is installed on the drone 50, and a command converter 20 is arranged in the drone 50, and all commands and data can be transmitted bidirectionally. The solid line in the figure is the internal line transmission channel, and the dashed line is It is a wireless transmission channel. in,
[0039] The wearable sensor 10 is worn on various parts of the human body, and is used to sense the motion and trend of various parts of the human body, and output corresponding motion data values;
[0040] The remote controller 30 is used to receive the motion data value output by the wearable sensor and forward it to the command converter; and to receive the real-time image returned by the UAV c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com