

Auxiliary mechanism for master and slave attitude control and control method
An auxiliary mechanism and attitude control technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inability to adjust the attitude of the main hand and not suitable for use, and achieve the effect of accurate adjustment of the main hand attitude, wide application and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
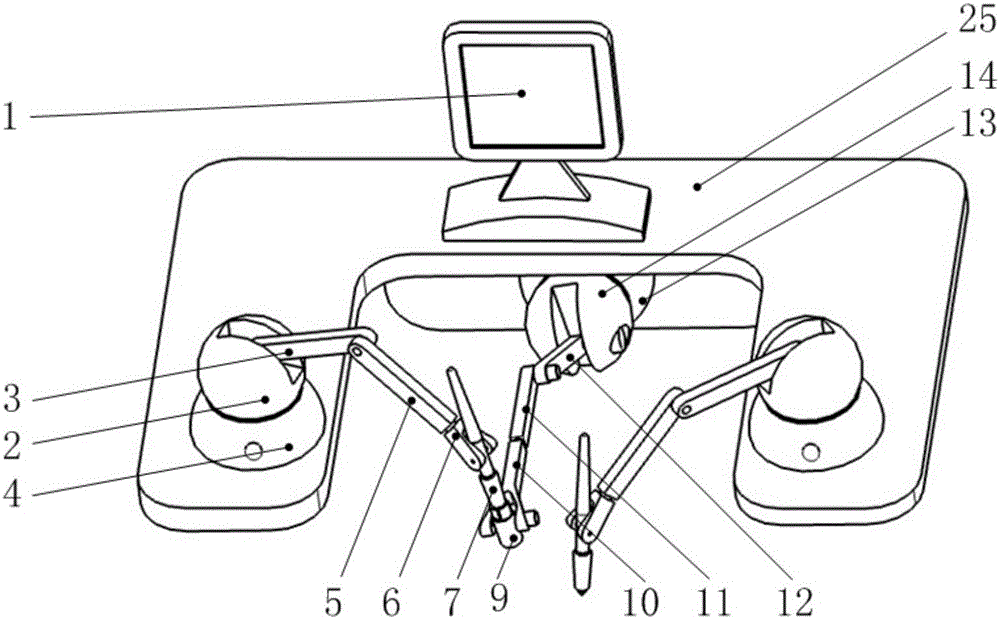
[0030] combine figure 1, usually, the 3-DOF master hand does not install a motor dedicated to controlling the attitude, so it cannot be adjusted directly by the slave hand attitude, and can only be adjusted in other ways. By triggering the auxiliary mechanism switches (2, one for each of the left and right mechanical master hands), the synchronous movement relationship between the master and slave hands is closed, and the slave hands are stationary. Driven by the motor, the auxiliary mechanism flips from the non-working area to the working area, and at the same time, the internal posture data is transmitted from the hand and the auxiliary mechanism, and the current posture of the slave hand (this posture can be combined with the movement of each motor of the slave hand and the slave hand robot). kinematics) is transmitted to the host...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More