

Precise self-centering chuck suitable for super-large workpieces
A self-centering chuck, super-large technology, applied in the direction of the chuck, can solve the problems of increased friction, excessive radial size, deviation, etc., to achieve high clamping and positioning precision, stable meshing rotation, The effect of ensuring positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
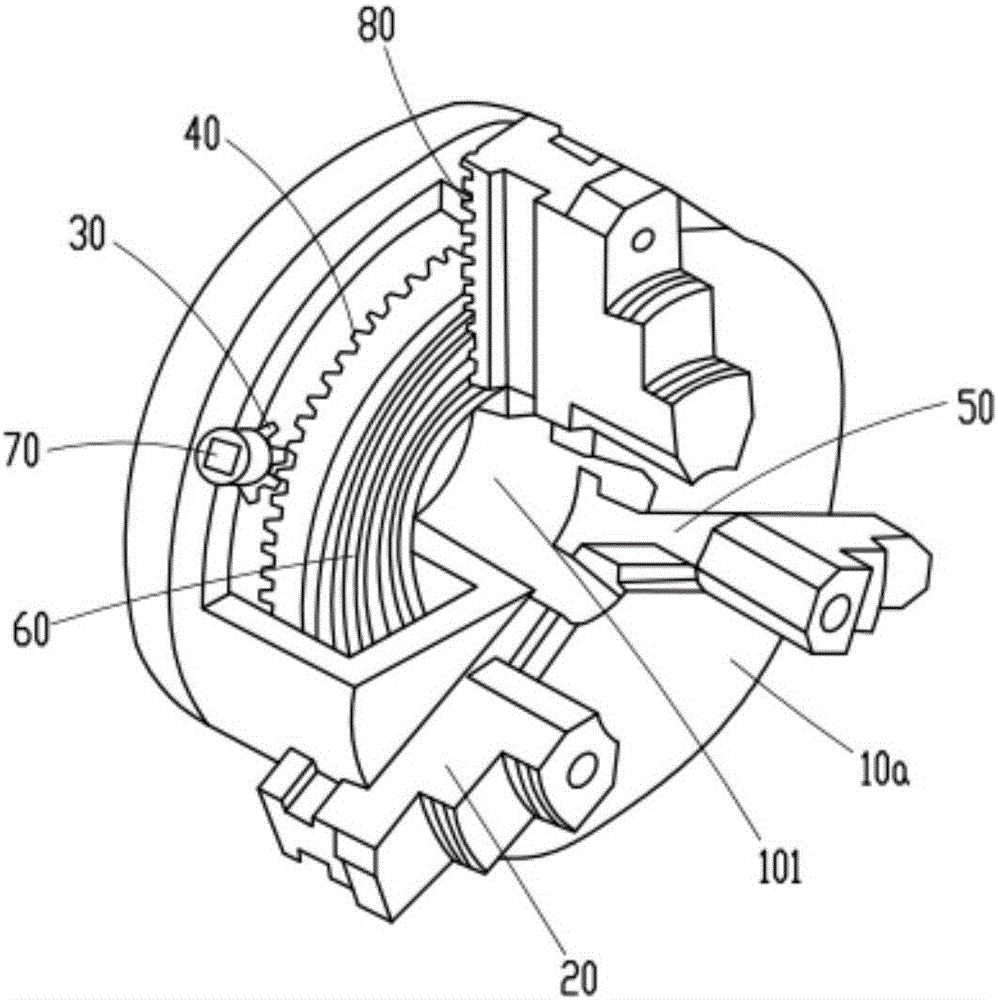
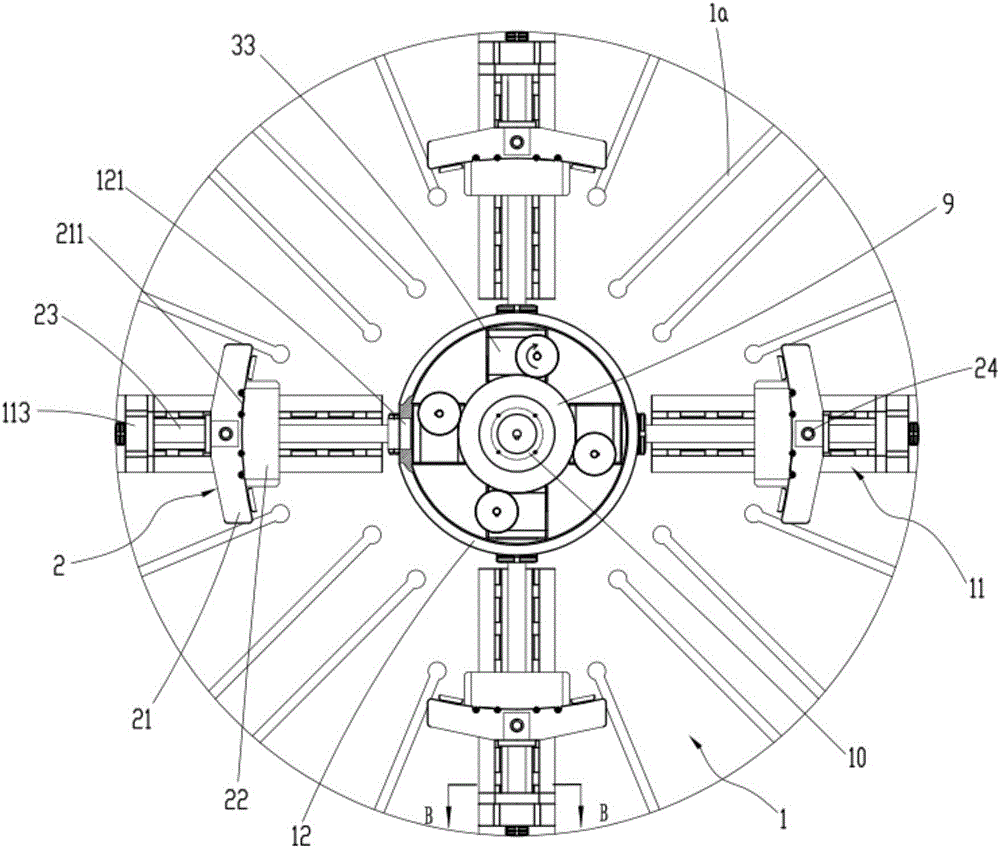
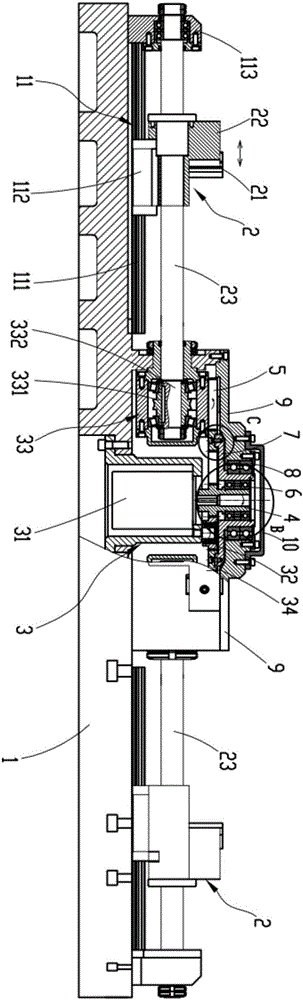
[0037] like figure 2 and image 3 As shown, the present invention provides a precision self-centering chuck suitable for extra-large workpieces, including a disc body 1 and a plurality of jaw mechanisms 2 slidably arranged on the disc body 1, and the disc body 1 is also provided with A jaw drive mechanism 3 that drives multiple jaw mechanisms 2 to clamp or loosen, the jaw drive mechanism 3 includes a numerically controlled torque motor 31, a plurality of transition gears 32, a secondary envelope reducer 33, and a first gear 34, Internal teeth 341 and external teeth 342 are respectively provided on the inner and outer circular surfaces of the first gear 34, and the numerically controlled torque motor 31 is arranged on the middle part of the disc body 1, and the motor shaft of the numerically controlled torque motor 31 is equipped with motor teeth 4, A plurality of transition gears 32 are evenly arranged between the motor teeth 4 and the first gear 34, and are all meshed with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More