

Binocular depth perception-based vehicle travelable area calculation method
A technology of depth perception and driving area, applied in computing, computer parts, instruments, etc., can solve problems such as road impassability, difficulty in estimating and analyzing and re-planning paths, difficulty in vehicle control planning, etc., to achieve high feasibility and accuracy. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
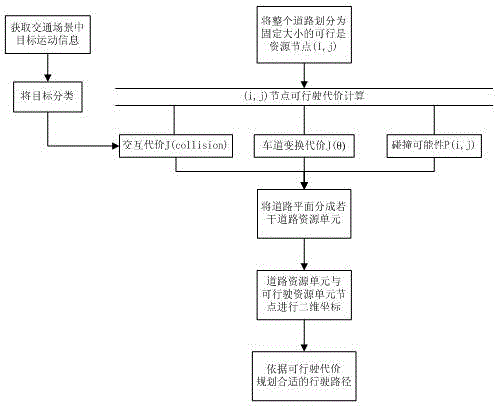
[0034] Such as figure 1 , the present invention provides a vehicle drivable area calculation method based on binocular depth perception, including the following:
[0035] Divide the entire road into several fixed-size drivable resource unit nodes (i,j);
[0036] For each drivable resource unit node (i,j), assuming that the vehicle travels to this node, calculate the resulting driving cost; the driving cost includes three parts: the cost caused by the vehicle choosing to change to the lane where the node is located J(θ), the probability P(i,j) that the vehicle collides with other targets in the scene at the (i,j) road node, and the cost J(collision) based on the vehicle interaction information calculated according to the probability P(i.j);
[0037] Objects on the road are identified using state-of-the-art techniques, and the motion vectors of the objects are also extracted. The main part of this method mainly includes two parts: calculation of driving cost and representation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More