

Novel lower extremity exoskeleton rehabilitation training device and training method
A rehabilitation training and exoskeleton technology, applied in the field of medical rehabilitation training equipment, can solve the problems of inability to accurately simulate gait laws, unfavorable for patient rehabilitation treatment, and increased burden on upper limbs and waist, so as to reduce pressure and reduce compression. , the effect of improving comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The structural features of the present invention will now be described in detail in conjunction with the accompanying drawings.
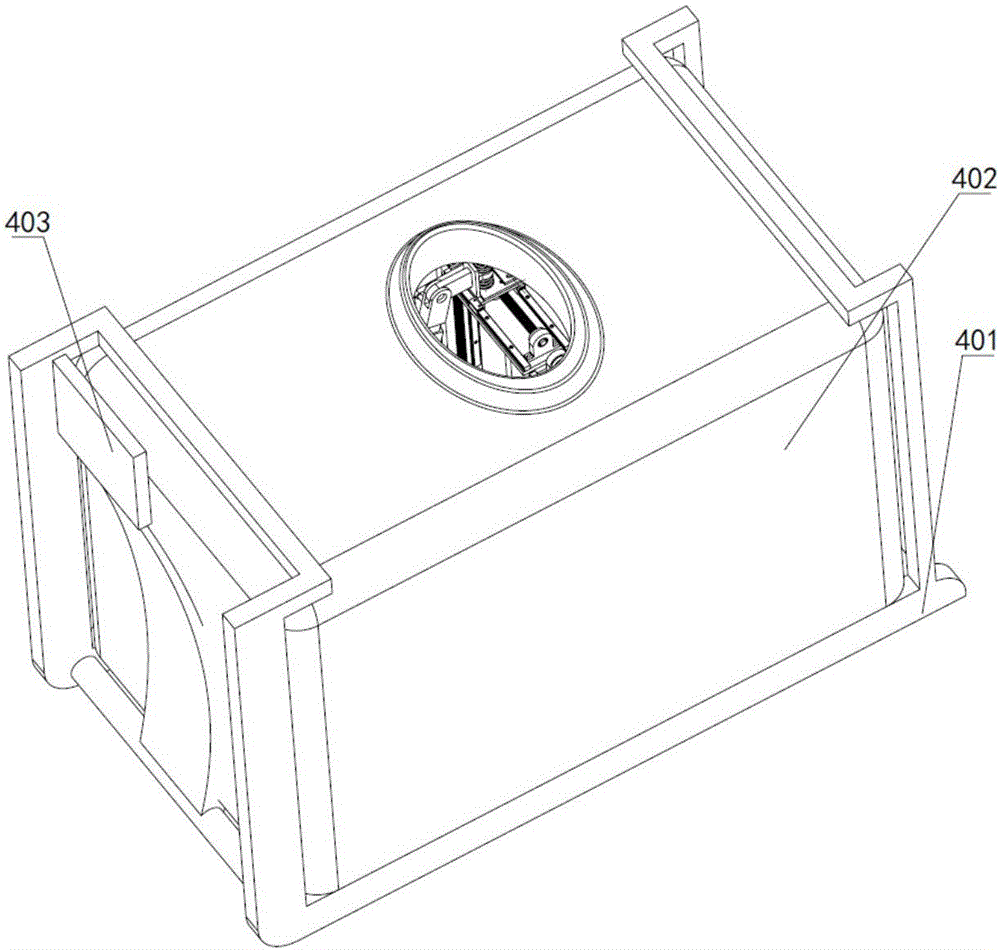
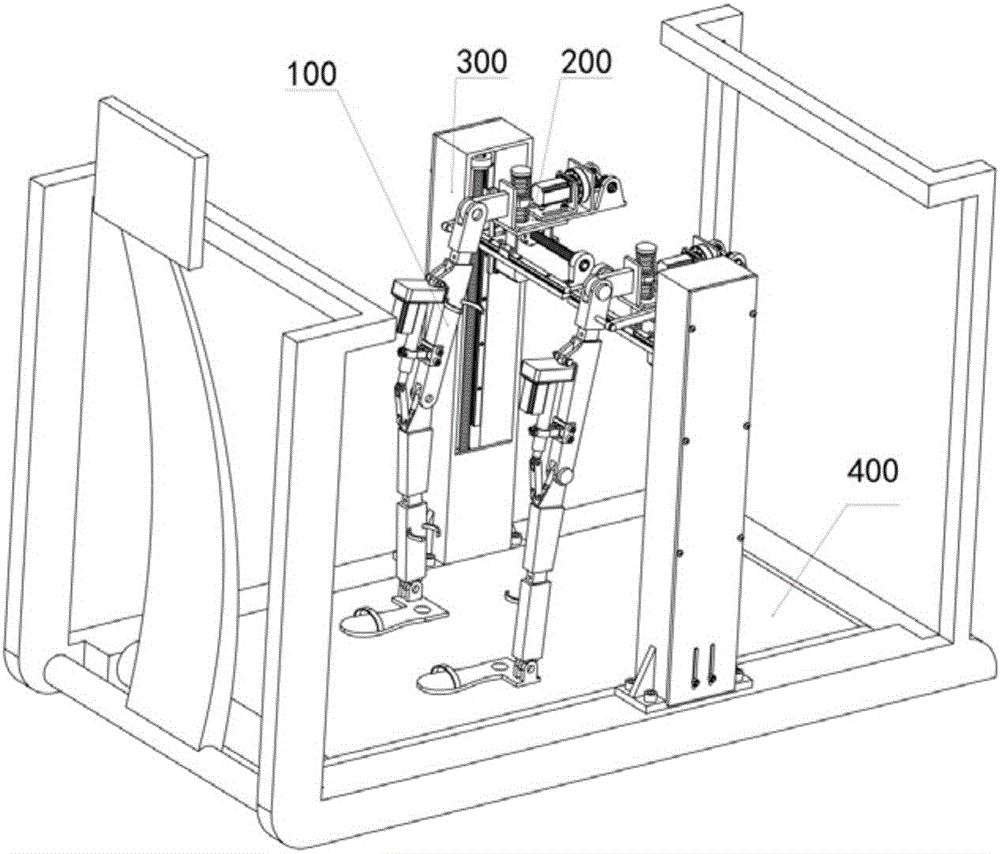
[0042] see figure 1 and figure 2 , a novel lower extremity exoskeleton rehabilitation training device, including an anti-gravity treadmill 400. The anti-gravity treadmill 400 includes a frame 401 , a support airbag 402 , a running board, a running belt, and a control display screen 403 . A running board and a supporting airbag 402 are arranged on the frame, wherein the supporting airbag 402 is located above the running board and has a circular hole. When the patient is performing rehabilitation training, the patient's waist is located in the round hole on the support airbag 402 . After the support airbag 402 is inflated, the patient's waist is clamped. A running belt is arranged on the length direction of the running board. A dial is provided at one end of the frame. The end provided with the dial is the front end of the anti-gravity t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More