

Whisker sensor for perceiving three-dimensional force displacement and three-dimensional force of contact point
A three-dimensional force and sensor technology, applied in the field of whisker sensors, can solve the problems of requiring a lot of time for scanning and the inability of robots to provide enough information, and achieve the effects of easy process processing, simple structure, and easy processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
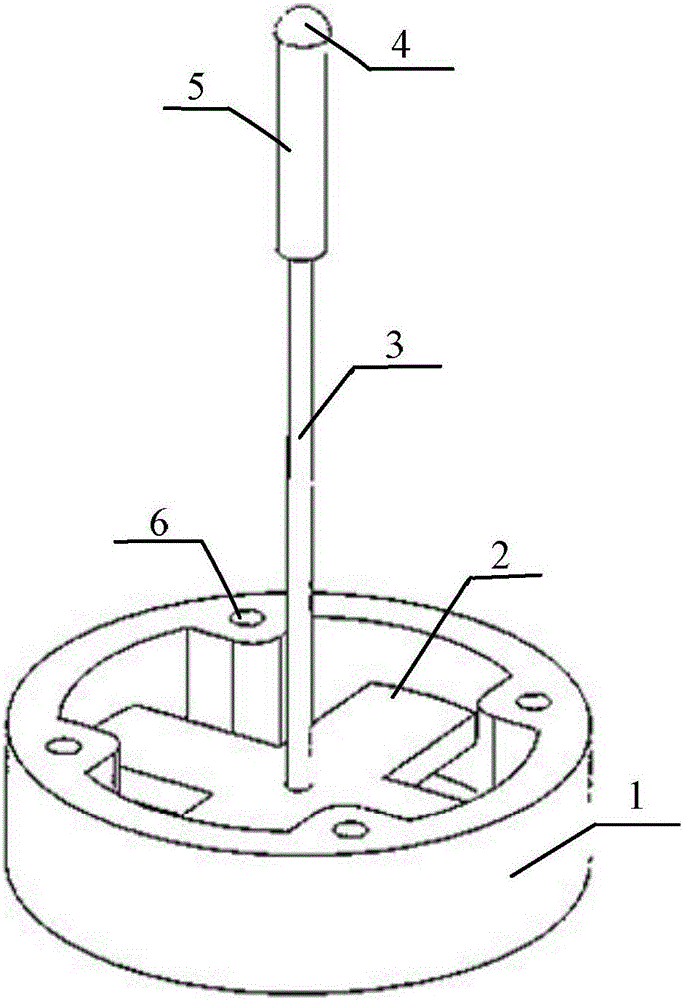
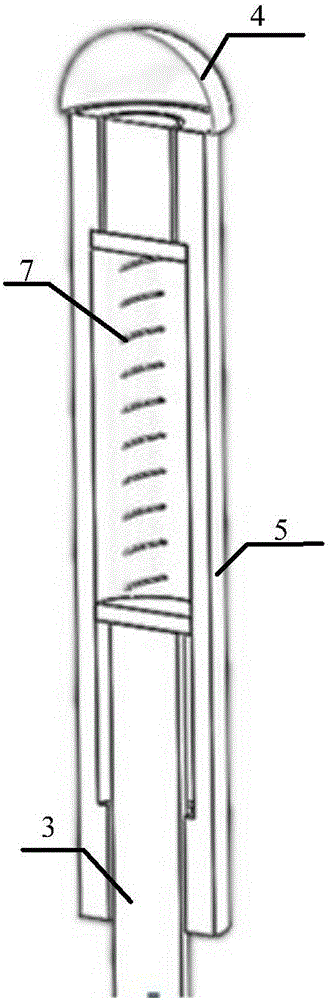
[0025] see Figure 1 to Figure 4 As shown, the present invention provides a whisker sensor for sensing three-dimensional force displacement and three-dimensional force of a contact point. The whisker sensor is installed on the robot body. The whisker sensor includes a cross-shaped elastic beam 1, a strain gauge 8, a flexible whisker 3, a contact Ball 4, spring 7 and bushing 5.
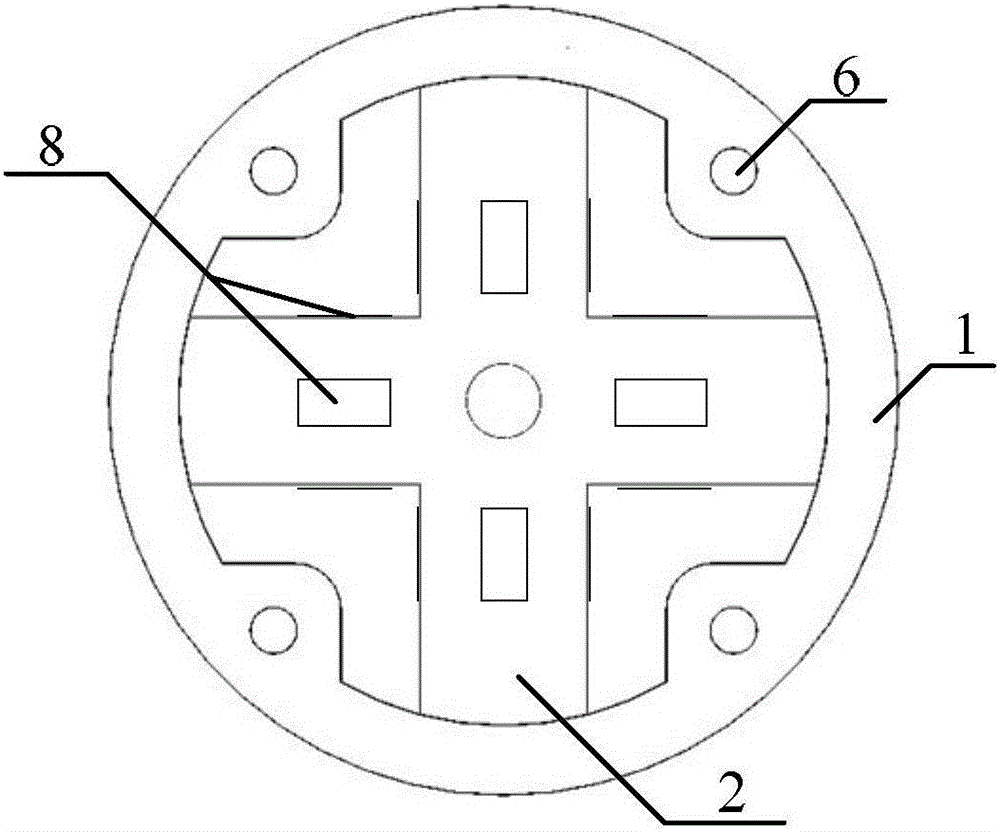
[0026] The cross-shaped elastic beam 1 is a hollow structure, including four elastic beams 2 built inside, a wheel rim and four wheel rim screw holes 6, wherein the four elastic beams 2 are alternated in pairs at 90° °, forming a cross shape, the upper and lower surfaces and the left and right sides are pasted with strain gauges 8; the four rim screw holes 6 are symmetrically distributed on the upper surface of the cross-shaped elastic beam 1 for fixing the position of the sensor.
[0027] Th...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More