

Unmanned aerial vehicle, unmanned aerial vehicle takeoff control method and apparatus
A control method and technology of a control device, which are applied in aircraft control, unmanned aerial vehicles, attitude control and other directions, can solve the problem of inability to accurately determine the take-off position of the UAV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
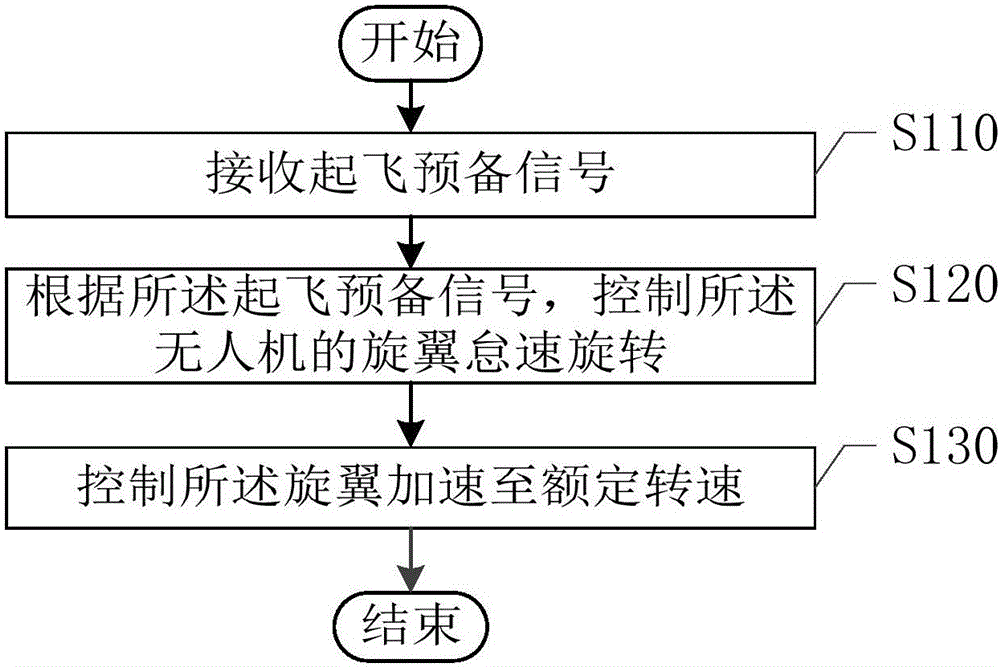
[0028] figure 2 It shows the UAV take-off control method provided by the first embodiment of the present invention, and the method is used to control the take-off of the UAV 100 . Specifically, the method includes:
[0029] Step S110: Receive a take-off preparation signal, wherein the take-off preparation signal is triggered and generated after the drone is positioned to a preset take-off altitude.
[0030] In this embodiment, the UAV 100 needs to be placed at a preset position first, and the preset position may include a position with a certain preset take-off height and a certain spatial regionality. Certainly, in this embodiment, the specific position of the preset position is not limited.
[0031] Moreover, the way to place the UAV 100 at the preset position may be directly lifting it by hand, or other auxiliary devices, such as a movable platform with a certain height. Of course, the specific way of placing the drone 100 at the preset position is not limited.
[0032...
no. 2 example
[0072] Figure 5 A schematic structural diagram of the drone take-off control device 200 provided by the second embodiment of the present invention is shown. See Figure 5 , the UAV take-off control device 200 includes:
[0073] The preparation signal receiving module 210 is configured to receive a take-off preparation signal, wherein the take-off preparation signal is triggered and generated after the UAV is positioned to a preset take-off height.
[0074] The rotor control module 220 is configured to control the idle rotation of the rotor of the UAV according to the take-off preparation signal.
[0075] The rotor control module 220 is also used to control the rotor to accelerate to the rated speed.
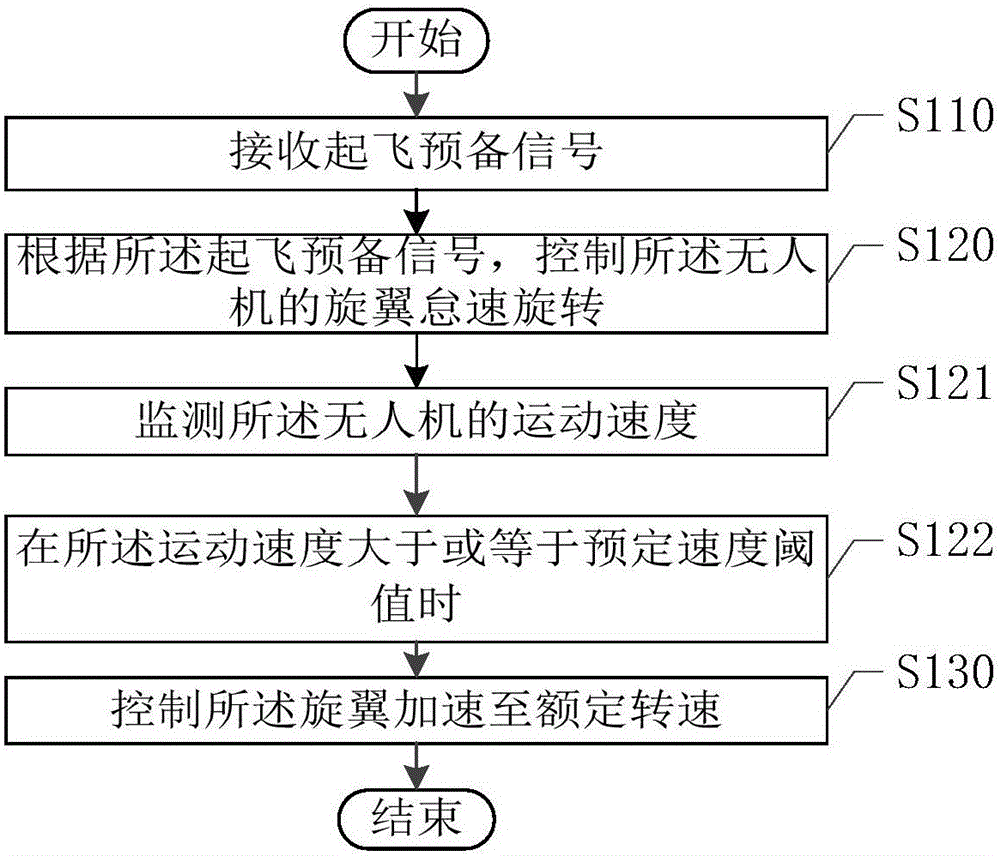
[0076] Further, in an implementation of this embodiment, after the rotor control module 220 controls the idle rotation of the rotor, the movement speed of the UAV 100 is monitored to obtain the acceleration condition for the rotor to accelerate to the rated speed. Therefore, ...
no. 3 example
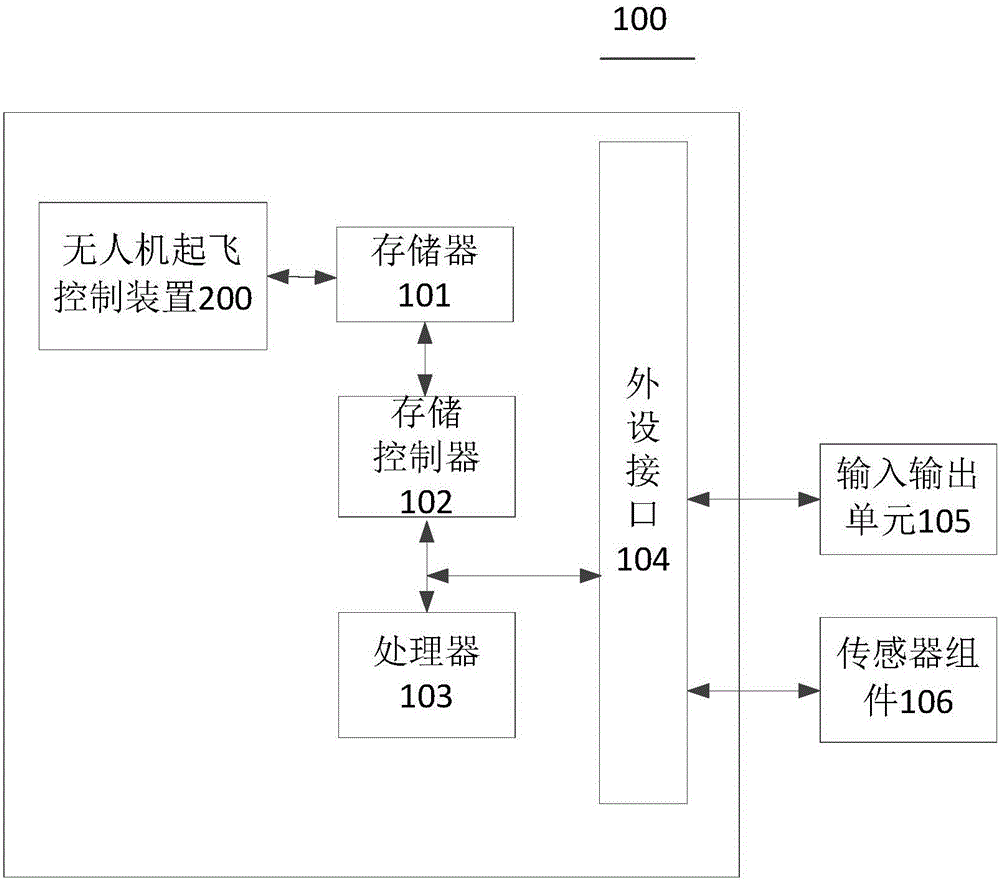
[0087] Such as Image 6 As shown, the present invention provides a drone 300, the drone includes a receiving unit 302 and a processor 301, the processor 301 is electrically connected to the receiving unit 302; the receiving unit 302 is used to receive take-off preparation instructions and The take-off preparation instruction is converted into a take-off preparation signal and then sent to the processor 301, wherein the take-off preparation instruction is triggered by the user after the drone is positioned to a preset take-off height; The take-off preparation signal is used to control the idle rotation of the rotor of the drone; the processor 301 is also used to control the rotor to accelerate to a rated speed.
[0088] It can be understood that the drone take-off control method provided in the embodiment of the present invention can also be implemented by the overall hardware device of the drone 100 provided in this embodiment.
[0089] Specifically, in this embodiment, the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More