

High-maneuverability and high-adaptability ground unmanned platform
An unmanned platform and adaptive technology, applied in motor vehicles, tracked vehicles, transportation and packaging, etc., can solve problems such as poor mobility, restrictions, and slow driving speed, and achieve good obstacle surmounting, improved terrain adaptability, and smooth travel Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
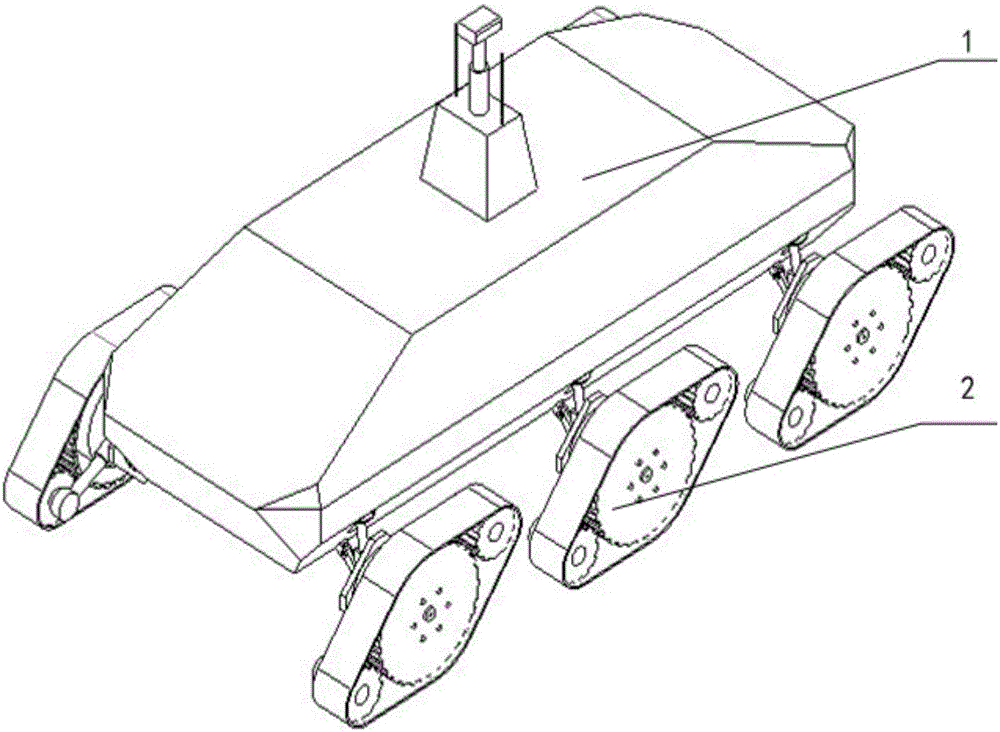
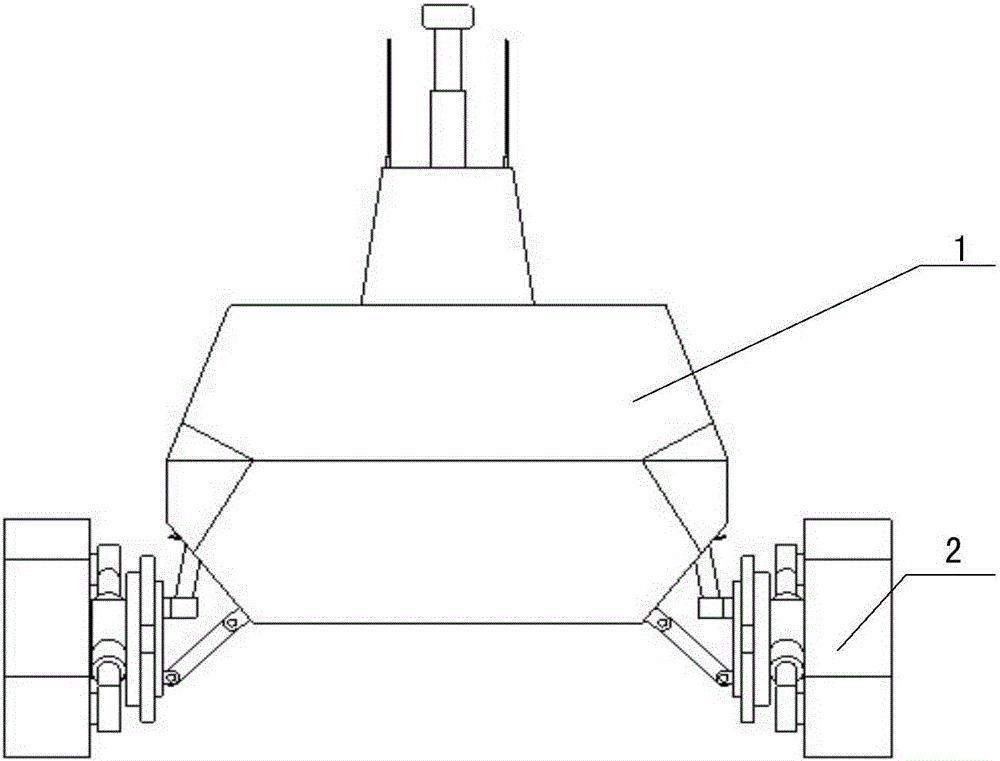
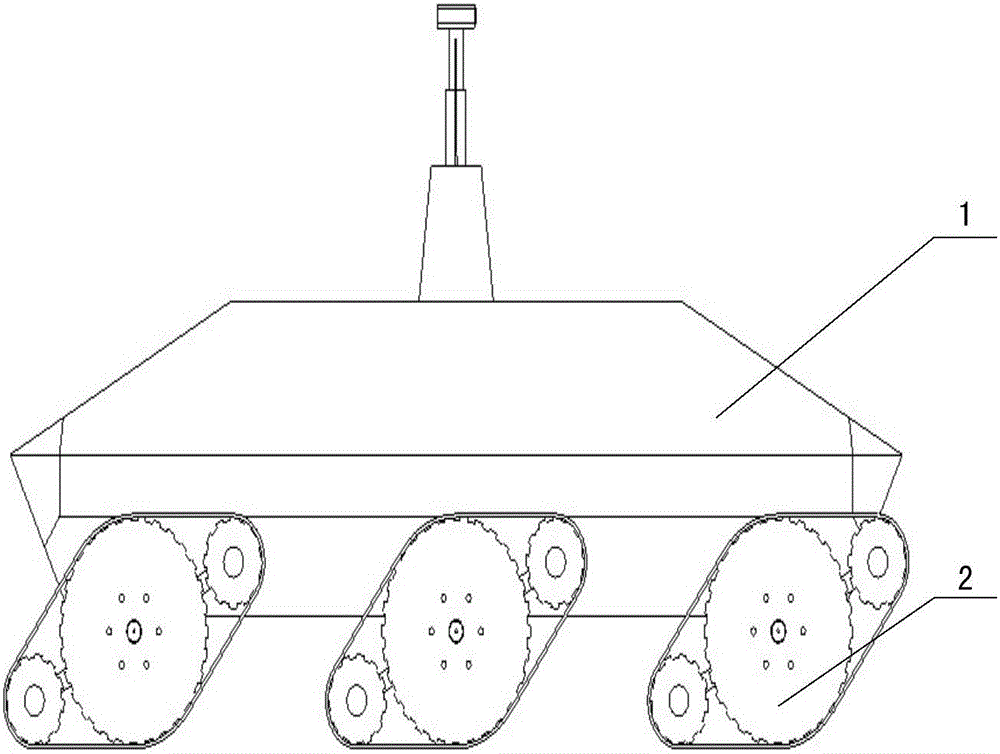
[0032] see figure 1 , figure 2 , image 3 with Figure 4 , the high-mobility and high-adaptability ground unmanned platform in this embodiment includes a body platform 1 and six sets of independent drive mechanisms 2, and the six sets of independent drive mechanisms 2 are symmetrically arranged on both sides of the body platform 1, and the left and right sides are respectively provided with three Each set of independent drive mechanism 2 is driven by a separate hub motor to drive the crawler, and the steering function of the body platform 1 is realized by the differential speed control between the independent drive mechanisms on both sides. , so as to form a 6×6 driving mode of the ground unmanned platform.
[0033] see Figure 5 , Image 6 , Figure 7 with Figure 8 , the independent driving mechanism 2 includes a suspension system 3, a crawler running mechanism 4 and a half shaft 12, the crawler running mechanism 4 is connected to the vehicle body platform 1 through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More