

Unmanned aerial vehicle air docking method and system
A kind of aerial docking, the first unmanned aerial vehicle technology, applied in the direction of control/adjustment system, non-electric variable control, instrument, etc., can solve the problems such as the inability to achieve accurate docking, limited precision of GPS module, and difficulty of unmanned aerial vehicles, etc. To achieve the effect of convenient docking or separation and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] Please refer to figure 1 , Embodiment 1 of the present invention is:
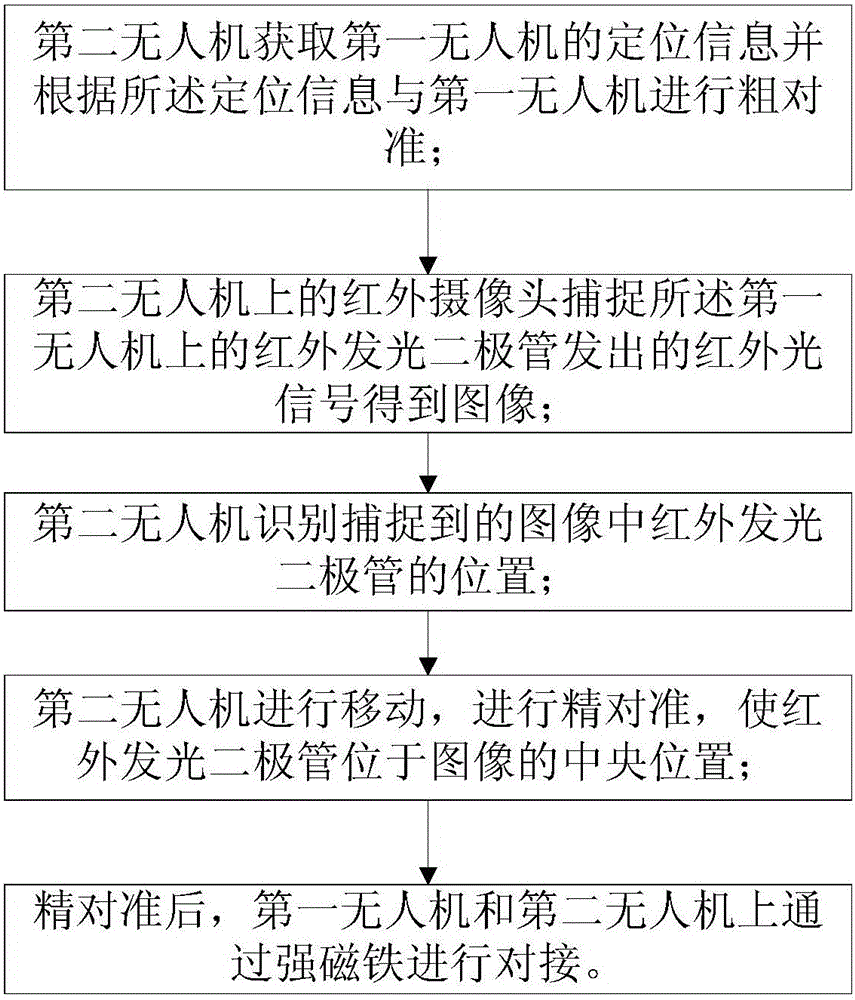
[0048] A kind of unmanned aerial vehicle docking method provided by the present invention comprises:
[0049] The second UAV acquires the positioning information of the first UAV and performs rough alignment with the first UAV according to the positioning information;
[0050] The infrared camera on the second drone captures the infrared light signal sent by the infrared light-emitting diode on the first drone to obtain an image;
[0051] The second UAV identifies the position of the infrared light emitting diode in the captured image;
[0052] The second UAV moves and performs fine alignment so that the infrared light-emitting diode is located in the center of the image;
[0053] After fine alignment, the first drone and the second drone are docked with strong magnets.
[0054] The specific implementation is as follows:
[0055] 1. The two UAVs are in the shape of "I". The head of the UAV is eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More