

Wire arrangement structure of five/six-axis motor of six-degree-of-freedom industrial robot
An industrial robot and degree-of-freedom technology, used in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of complex wiring structure of five or six-axis motors, restricting the structure and appearance of robots, and achieve clear wiring and compact space. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described and defined below in conjunction with the accompanying drawings and specific embodiments.
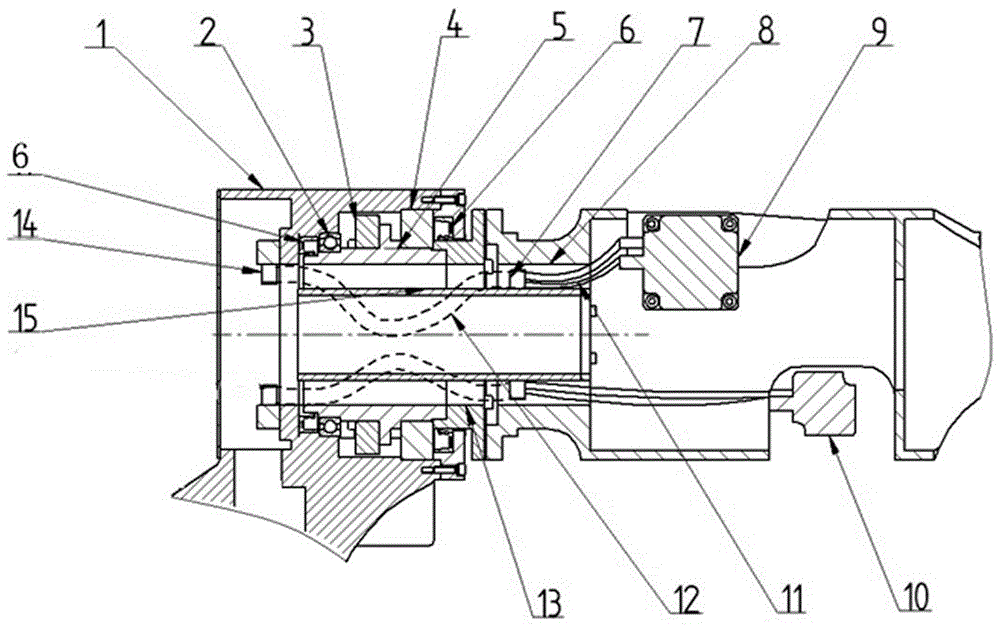
[0016] like figure 1 As shown, a wiring structure of a six-degree-of-freedom industrial robot five-six-axis motor includes an elbow housing 1, an arm 8 connected to the elbow housing 1, and a five-axis motor 10 and a six-axis motor mounted on the arm 8. The motor 9, the elbow housing 1 is provided with a hollow central shaft 5, and the central shaft 5 is provided with a hollow sleeve 15 that coincides with its axis. In the shafting space, the hollow sleeve 15 forms a space for external equipment cables to pass through. The shafting space between the central rotating shaft 5 and the hollow sleeve 15 is provided with a wire guard spring 12 for protecting the five or six axis motor cables. The two ends of the wire protection spring 12 are fixed by the fixed end wire clamp 14 and the rotating end wire clamp 7 .
[0017] In this embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More