

Multipurpose flexible materialization programming module and realizing method thereof
A programming module and multi-purpose technology, applied in the field of human-computer interaction, can solve problems such as low efficiency, and achieve the effects of avoiding abstraction, improving control efficiency, and intuitive object response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] Embodiment 1, programming controls robot dance.
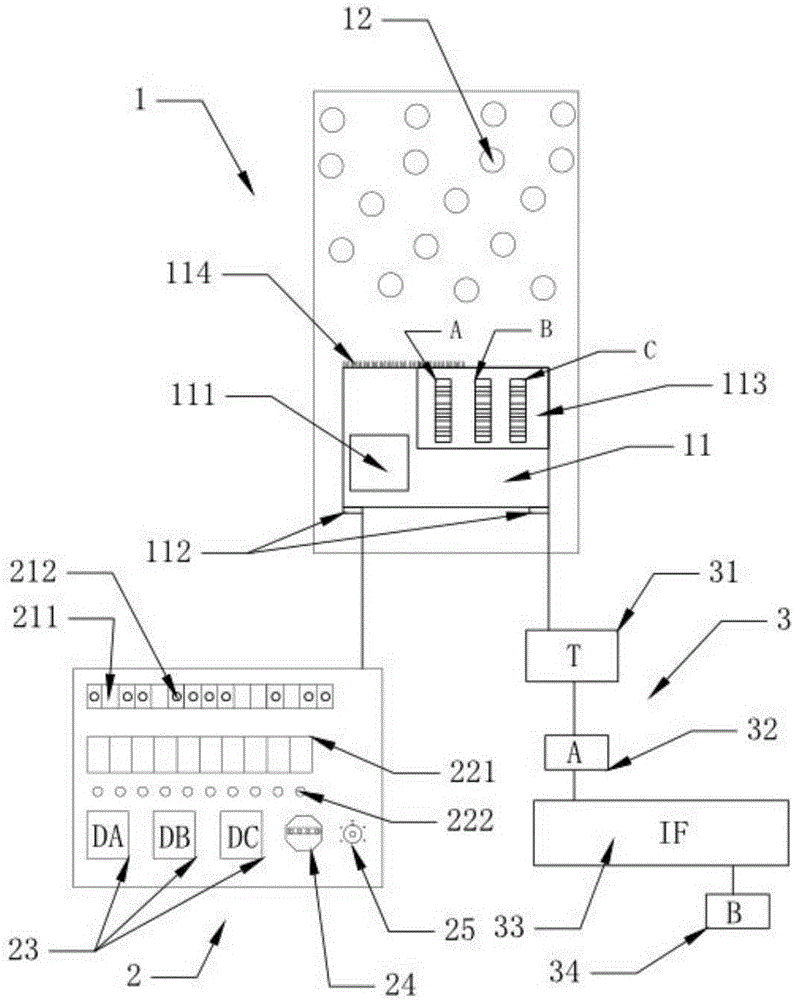
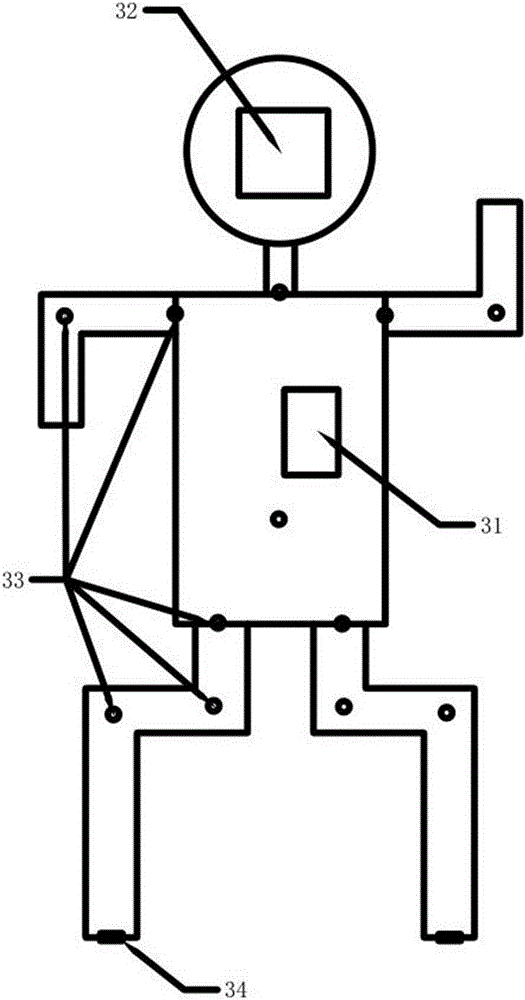
[0046] The program-controlled object is a robot and is designed to at least include various movements of squatting, half squatting, standing up, bending over, raising the head, lowering the head, and turning the head. Even connecting these movements in series can form a coherent dance movement, thus providing the robot operator with A visualization tool for dance programming. Such as figure 2 As shown, in the present embodiment, the robot is provided with a main control board 31, and the response part is a steering gear 33 and a motor 34 provided at each joint of the robot. It is not difficult to find that the robot head is provided with an expression board 32 (about this part) The programming operation will be further described in detail in the following embodiments). Corresponding to these response parts, the above-mentioned manual control part 211 is a knob for one-to-one adjustment of the angle of the steering gea...
Embodiment 2
[0049] Embodiment 2, programming and controlling home improvement light strips.
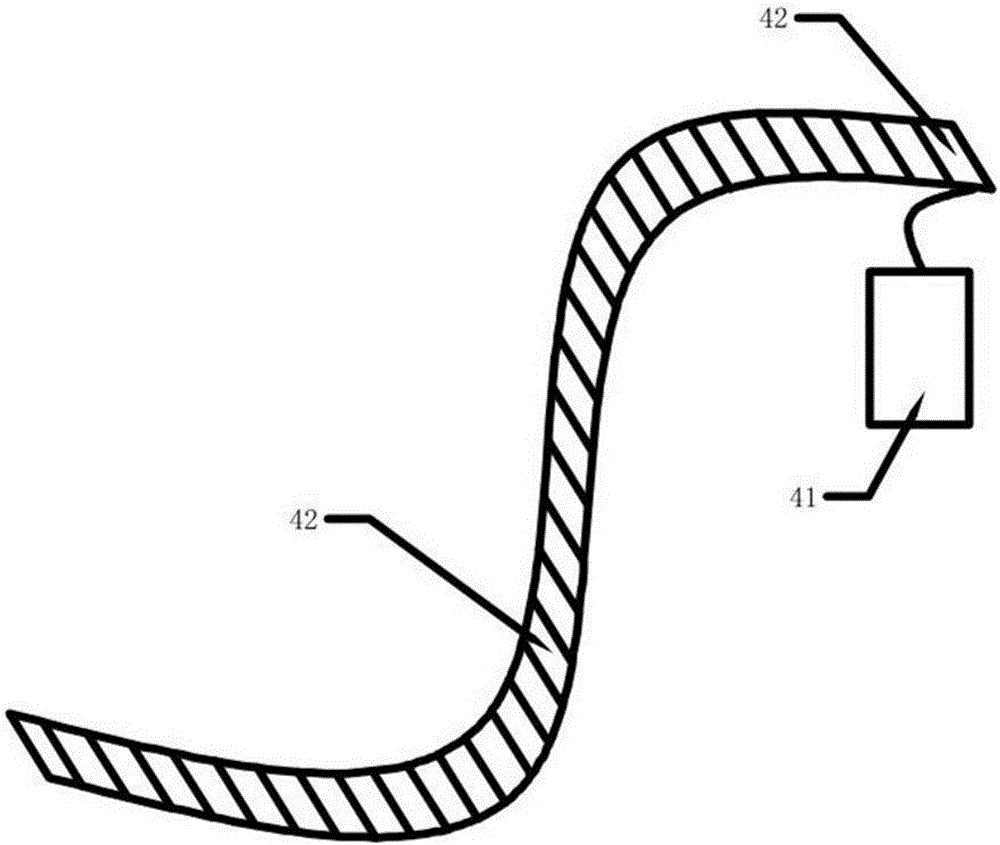
[0050] The program-controlled object is a home decoration light strip and is designed with a variety of actions including at least flickering, color changing, and circular color transfer. After creative arrangement, it can provide a concrete tool for home owners to create different lighting atmosphere designs. Such as image 3 As shown, in this embodiment, the home decoration light strip is connected to the main control board 41, and the response part is the LED 42 in the home decoration light strip that conforms to the RGB rule. The above-mentioned manual control part 211 corresponding to the response part is a button or a knob (not shown in detail) for one-to-one adjustment of LED light emission color and brightness, which can implement individual control and high-precision adjustment for each or segmented LED. M positioning registers respectively record the color and brightness sets of all LE...
Embodiment 3
[0053] Embodiment 3, programming to control the expression of the robot.
[0054] The program control object is figure 2 and Figure 4 The expression board on the head of the robot shown is designed with a variety of expression movements including at least happiness, anger, sadness, joy, raindrops, light spot diffusion, and pointing. After creative arrangement, it can provide rich changes in robot expressions. Such as Figure 4 As shown, in the present embodiment, the expression board 32 is connected with a main control board 321 (which can be a separate main control board, or the main control board of the complete robot), and the response part is arranged in an array in the expression board 32. Set the LED322. The above-mentioned manual control part 211 corresponding to the response part is a button (not shown in detail) corresponding to switching and controlling the LED on and off, and can individually control each LED. M positioning registers respectively record the on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More