Automatic parachute ejection special control circuit of multi-rotor-wing unmanned aerial vehicle
A multi-rotor UAV and parachute technology, applied in the field of circuits, can solve the problems of injury to people and objects, and the damage of aircraft falling from high altitude, so as to achieve the effect of protecting the safety of the machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below with reference to the accompanying drawings and in combination with embodiments.
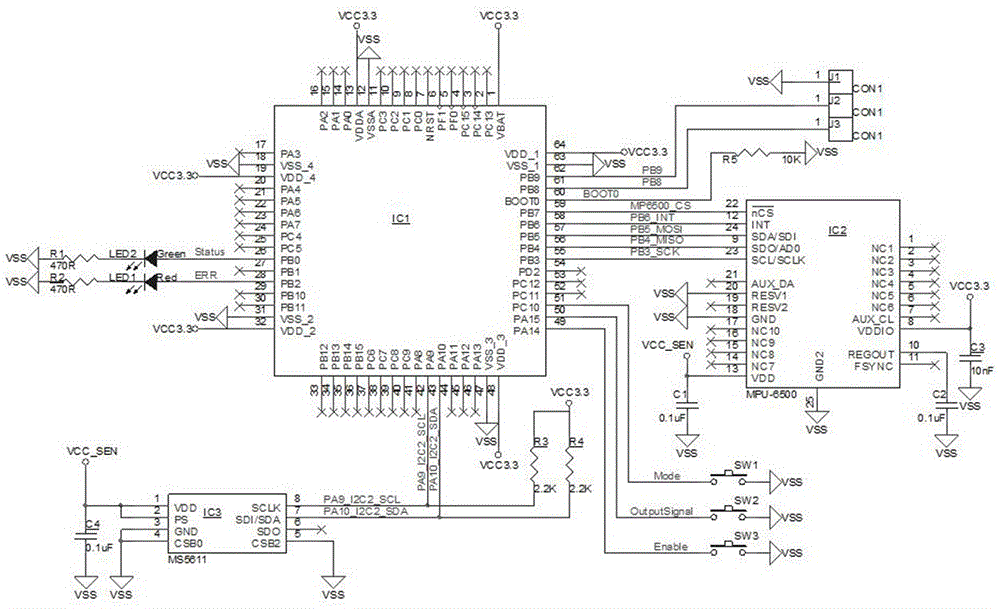
[0015] As shown in Figure 1, a multi-rotor UAV automatic parachute control circuit, including 3 chips: main control chip IC1, gyroscope accelerometer IC2, barometer IC3, 5 resistors R1, R2, R3, R4 , R5, 4 capacitors C1, C2, C3, C4, 2 light-emitting diodes LED1, LED2 and 3 connectors J1, J2, J3, the main control chip IC1 through 55, 56, 57, 58, 59 five SPI interface signals are connected with the gyroscope accelerometer IC2, the main control chip IC1 is connected with the barometer IC3 through the two I2C interface signals 42 and 43 of the chip, and the main control chip IC1 is connected with the barometer IC3 respectively through The 28 pins and 26 pins of the chip are connected to the light-emitting diodes LED1 and LED2, and the light-emitting diodes LED1 and LED2 are respectively connected to the resistor R2 and the resistor R1. P...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com