

AGV traffic dispatching management method based on traffic control area
A technology of traffic control and implementation method, which is applied in the direction of traffic control system, road vehicle traffic control system, control/regulation system, etc. It can solve the problems of complex control methods, low work efficiency, and increased navigation costs, so as to improve navigation efficiency , smooth traffic, and reduce navigation costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
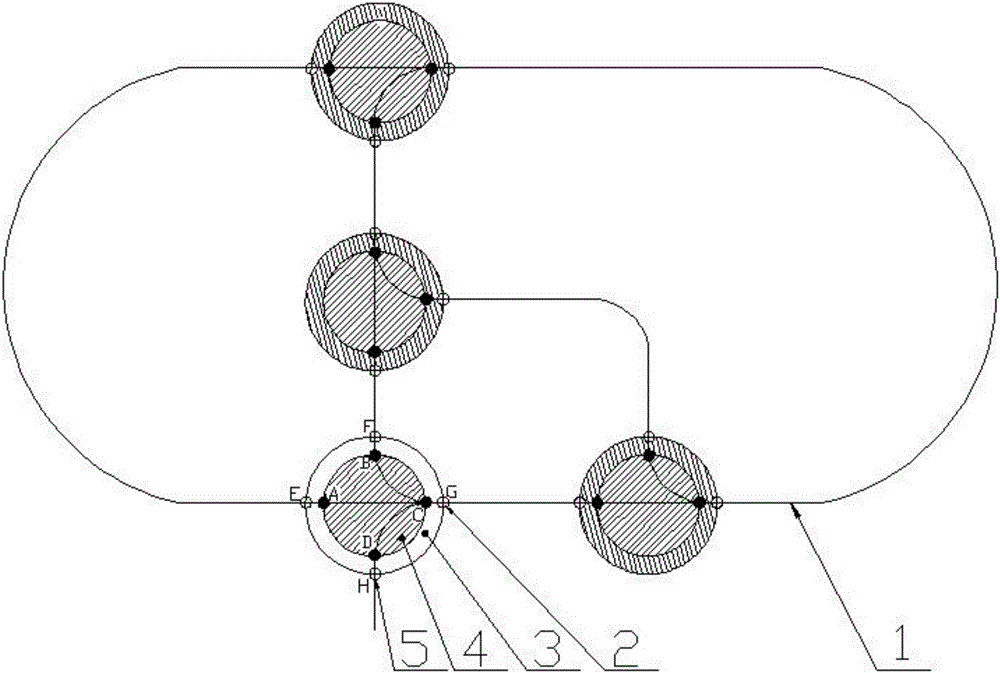
[0020] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
[0021] A method for implementing AGV traffic dispatch management based on traffic control areas is realized by setting traffic control areas and traffic control adjacent areas in multiple path intersection areas on the AGV map. Such as figure 1 As shown, the traffic control area 4 and the traffic control adjacent area 3 are set on the navigation path 1 on the AGV map. The traffic control area includes four traffic control identification nodes 5 (A, B, C, D), and the traffic control adjacent area It includes four traffic control proximity identification nodes 2 (E, F, G, H), that is to say: the identification nodes include non-traffic control identification nodes, traffic control identification nodes and traffic control proximity identification nodes. The categories of the recognition nodes are distinguished according to the attributes of the recog...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More