

A multi-stage telescopic composite mechanical arm
A manipulator and telescopic technology, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve the problem of insufficient space for the lead screw device, and achieve the effects of simple and compact structure, long service life and good toughness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
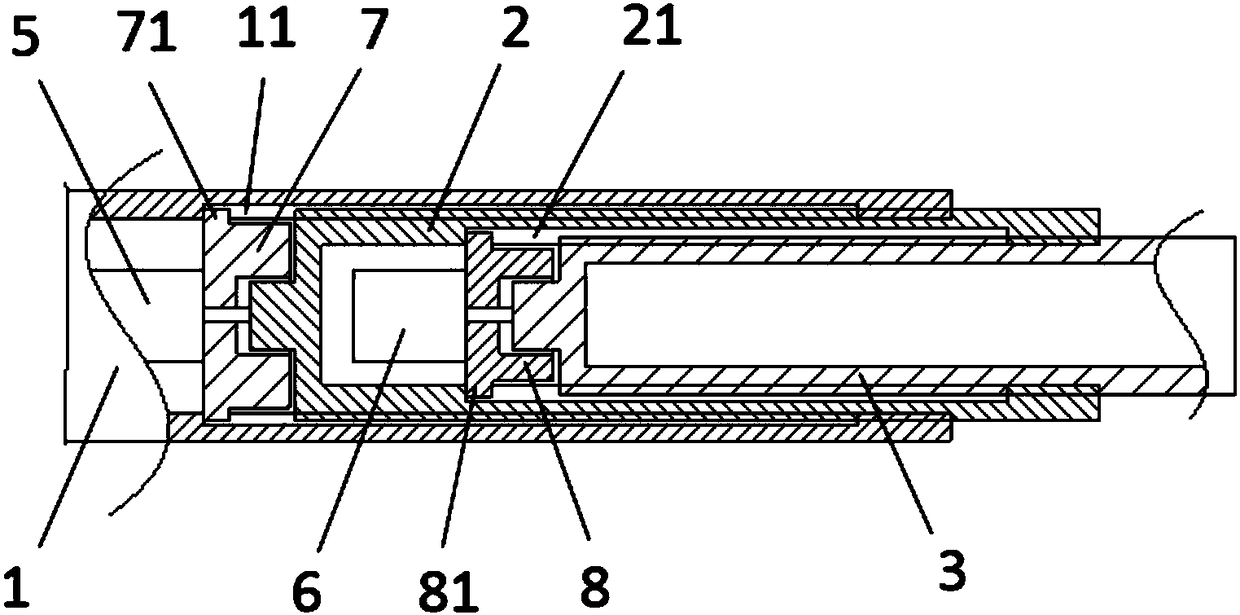
[0019] A kind of multi-stage retractable compound mechanical arm of the present invention, such as figure 1 and figure 2 As shown, it includes a first mechanical arm 1, a second mechanical arm 2, and a third mechanical arm 3, wherein one end of the second mechanical arm 2 is set in the hollow cavity of the first mechanical arm 1, and one end of the third mechanical arm 3 is set at the second In the hollow cavity of the second mechanical arm 2, the first mechanical arm 1 is screwed to the second mechanical arm 2, the second mechanical arm 2 is screwed to the third mechanical arm 3, and the second mechanical arm 2 and the third mechanical arm 3 are both made of Driven by an independent drive system; the inner wall of the hollow cavity of the first mechanical arm 1 is provided with internal threads; the outer periphery of the second mechanical arm 2 is provided with external threads, and the inner wall of the hollow cavity is provided with internal threads; the outer periphery o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More