

Hydraulic system adaptive robust control method based on consistent-robustness accurate differentiator
An adaptive robust, hydraulic system technology, applied in the field of control, which can solve problems such as parameter determinism, uncertainty, nonlinearity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
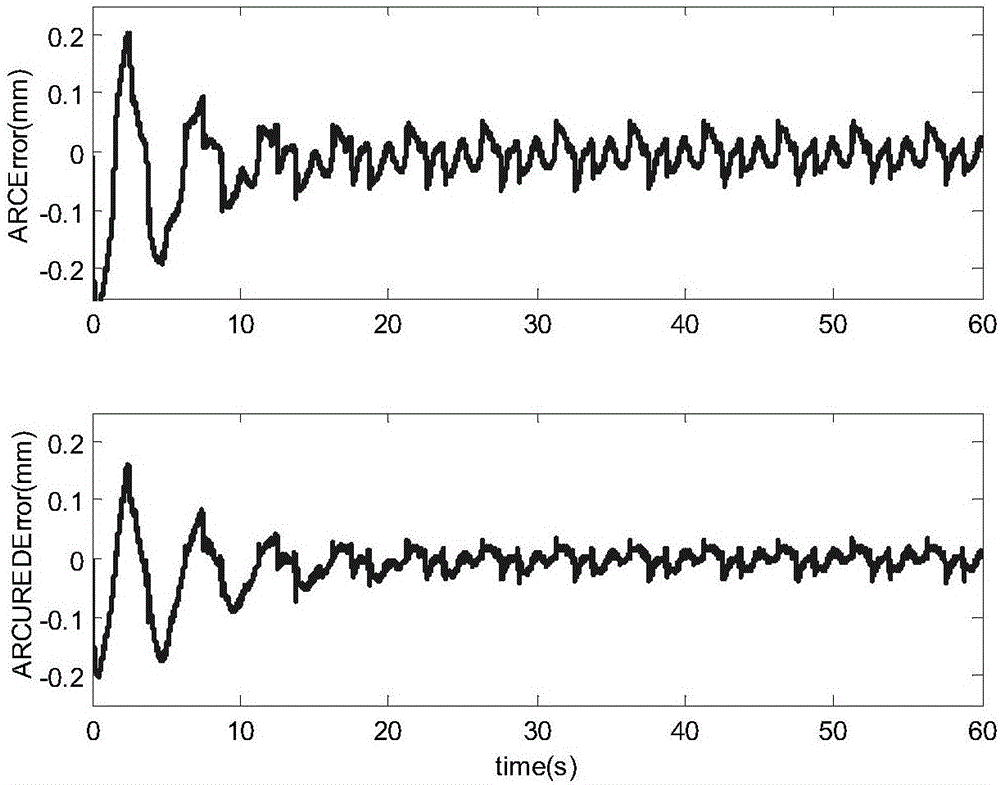
[0234] This paper proposes an Adaptive Robust Controller Based on Virtual Control Compensation (ARCURED). The system parameters are: m=30kg, A=9.05×10 -4 m 2 ,V t =7.96×10 -5 m 3 ,P s =10Mpa,P r = 0.08 MPa. Select the parameter uncertainty range as θ min =[0.1,0.1,1×10 5 ,0.1,-1×10 5 ] T , θ max =[300,100,1×10 7 ,1000,1×10 5 ] T , the initial value of the given parameter estimate is with ε θ =[0.2, 10, 1, 3, 1] T , ε 2 = 1, ε 3 =1, the adaptation gain is Г=diag{3×10 -6 ,700,0.006,13,0.08}, controller design parameter k 1 =1200,k 2 =700,k 3 =200,b 1 = 3,b 2 = 3,c 1 = 1,c 2 =1. Position angle input signal x 1d =40arctan(sin(0.4πt))[1-exp(-t)](mm). In order to verify the effectiveness of the control strategy proposed in this paper, an adaptive robust controller (ARC) is introduced for comparison. The parameters of the adaptive robust controller are consistent with those of the controller designed in this paper.
[0235] The effect of the control l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More