

A shock-absorbing walking device for a building construction handling robot
A technology for handling robots and walking devices, applied in the field of shock-absorbing walking devices for construction handling robots, can solve the problems of low handling efficiency, many hidden dangers of dangerous accidents, poor road conditions, etc. The effect of strong carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
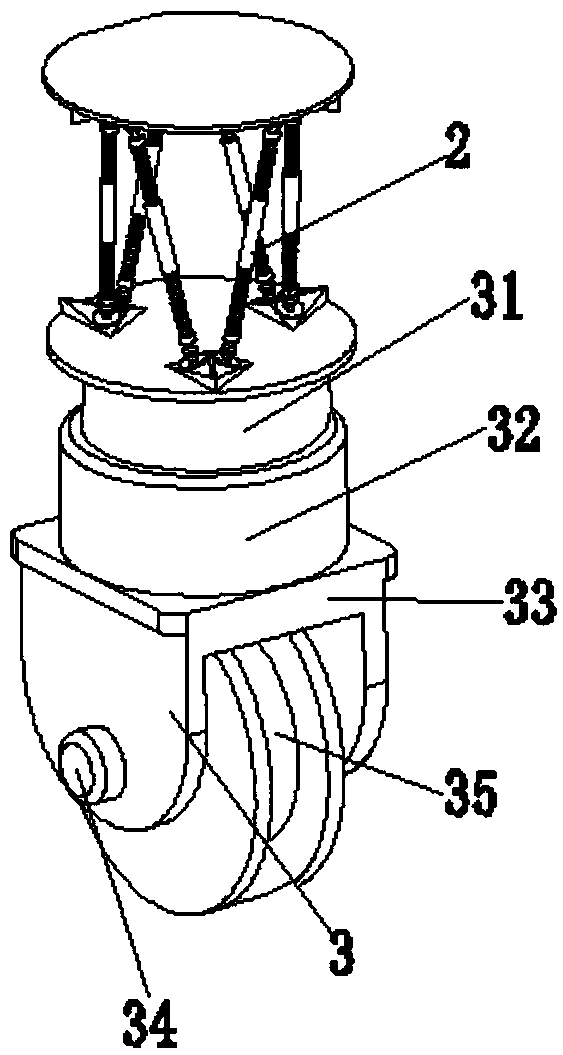
[0015] Such as figure 1 and figure 2 As shown, a shock-absorbing walking device for a building construction transport robot includes a six-degree-of-freedom parallel vibration table 2 and a walking device 3. The lower ends of the parallel vibrating table 2 are connected.
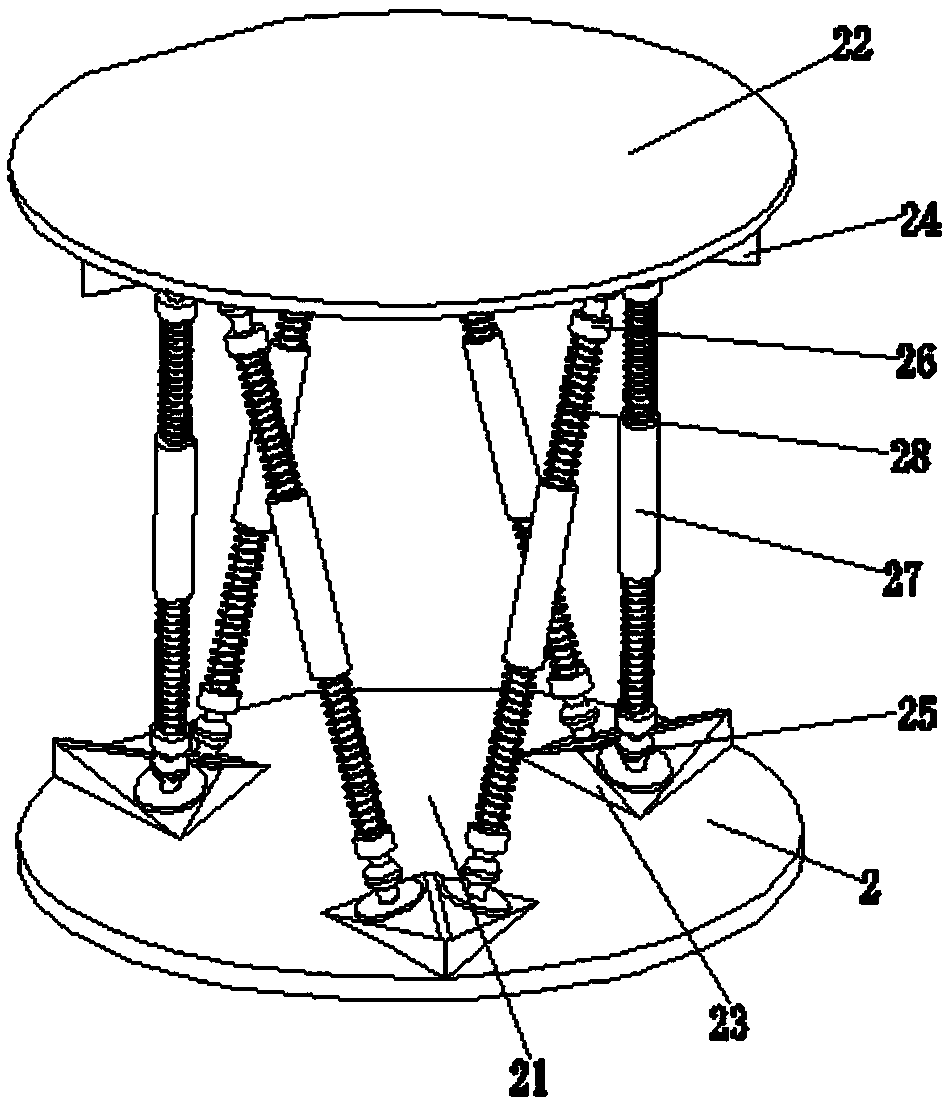
[0016] Such as figure 2 As shown, the six-degree-of-freedom parallel vibration table 2 includes a fixed platform 21, a moving platform 22, a lower triangular seat 23, an upper triangular seat 24, a ball hinge 25, a sleeve 26, a telescopic rod 27 and a limit spring 28. The quantity of triangular seat 23 and upper triangular seat 24 is three, the quantity of ball hinge 25, sleeve 26 and limit spring 28 is twelve, and the quantity of telescopic rod 27 is six; Described fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More