

Unmanned aerial vehicle route dynamic planning method based on A* search
A technology of dynamic programming and unmanned aerial vehicles, which is applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., and can solve problems such as poor adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
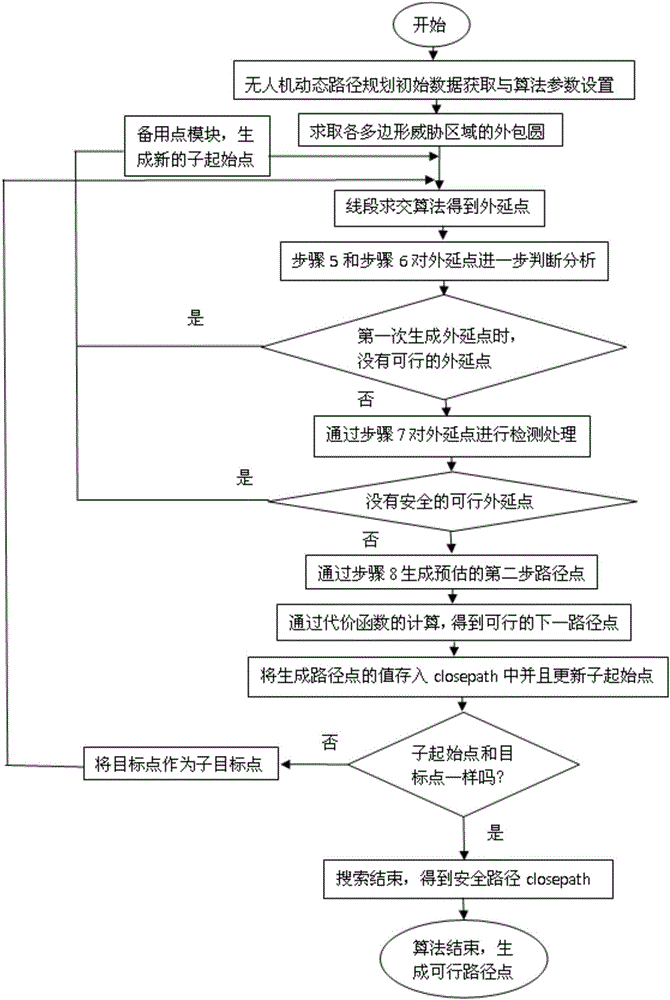
[0084] refer to Figure 1-6 . The specific steps of the UAV path dynamic planning method based on A* search in the present invention are as follows:
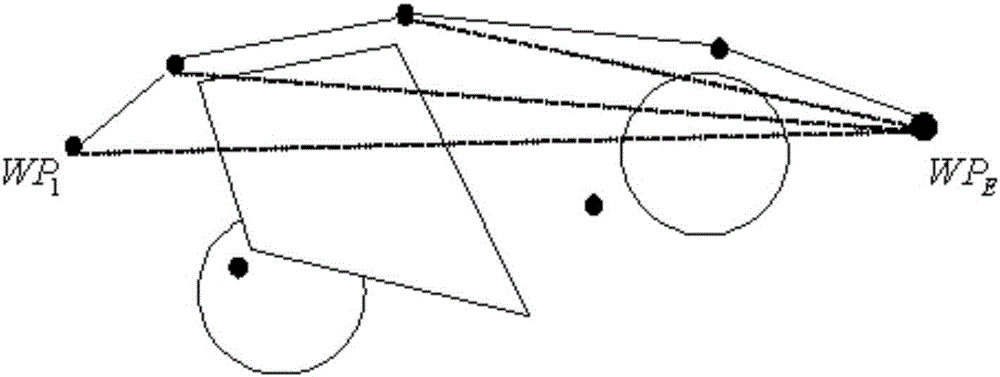
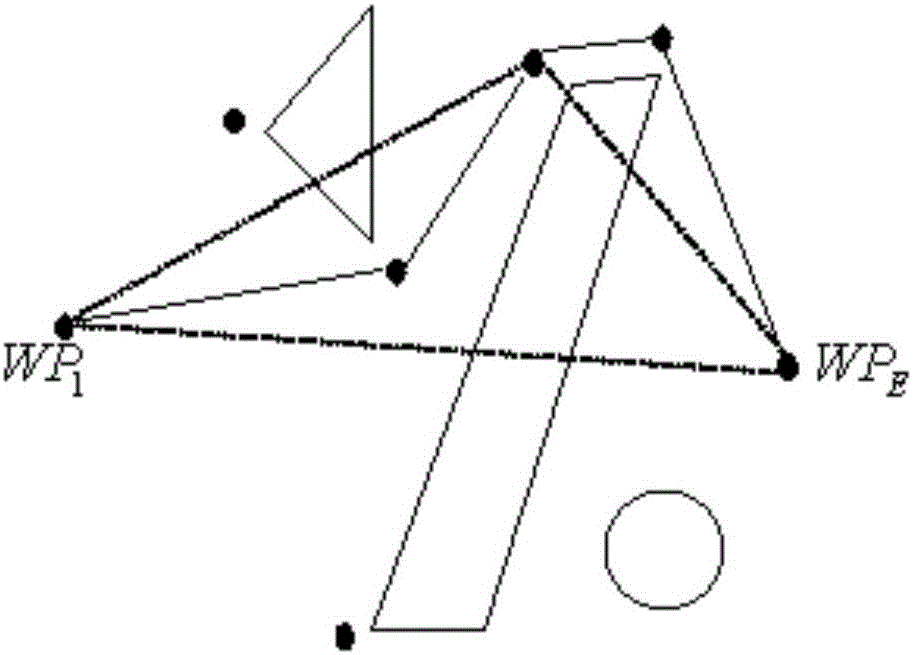
[0085] The simulation is carried out in a two-dimensional planar rectangular planning space of {(x,y)|-110km≤x≤110km, -90km≤y≤90km}, which includes circles, polygons, and threat areas superimposed on each other.
[0086] Step 1: Initial data acquisition and algorithm parameter setting for UAV dynamic path planning.
[0087] 1) Initial data acquisition.
[0088] ①Get the initial position coordinate WP of the drone 1 (50,80) and target position coordinates WP E (-110,-90);
[0089] ② The parameter data of the threat area includes: the number of threat areas modeled as circles M = 13, each circular threat area C i The center and radius of the circle (x i ,y i ,r i ), where i=1,2,...,M; the number of threat zones modeled as polygons N=10, the number of vertices of each polygon threat zone (n 1 ,n 2 ,...,n N ), each polyg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More