

Black zone-introduced express unmanned aerial vehicle track planning method based on A<*> and ant colony hybrid algorithm
A track planning and hybrid algorithm technology, applied in the field of express UAV track planning and UAV track planning, can solve problems such as difficult principles, achieve short paths, reasonable UAV tracks, and UAV track The effect of less energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention is illustrated below in conjunction with the accompanying drawings, and the parts not described in detail below all adopt the prior art.
[0052] 1 black area
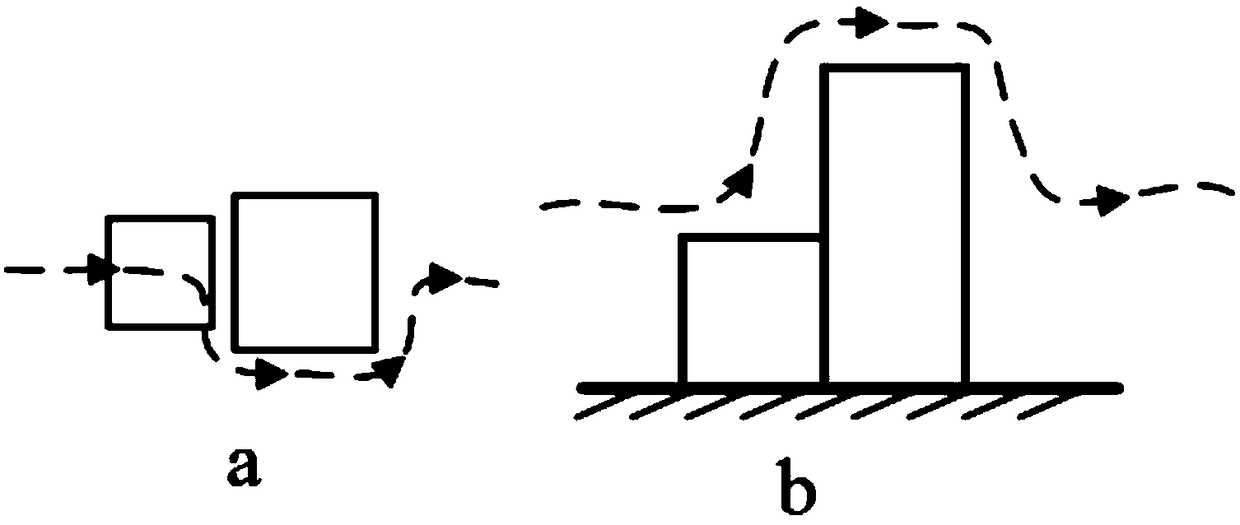
[0053] In order to ensure the rapidity of the UAV, the present invention divides the way the UAV flies over the obstacle into two types, the current flying height is h, and the height of the tall building of the obstacle is h 楼 , the set flight mode change threshold is h s .
[0054] 1: When the difference between the height of the obstacle and the flight height of the UAV is lower than the flight mode change threshold, that is h 楼 -h≤h s , the UAV chooses to fly directly from the top such as figure 1 (b) shown.
[0055] 2: When the height of the obstacle is higher than the flight mode change threshold, that is h 楼 -h>h s , then the UAV chooses to fly around from the side of the obstacle such as figure 1 (a) shown.
[0056]Flight mode 1 (over the top) can keep the UAV at the maximu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More