

Multi-camera calibration and alignment fitting method
A multi-camera, calibration technology, applied in image data processing, instruments, calculations, etc., can solve the problem of expensive hardware design, and achieve the effect of simplifying the configuration adjustment process, simplifying derivation, and eliminating system errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] In this embodiment, the multi-camera calibration and alignment bonding method, the calibration process includes:
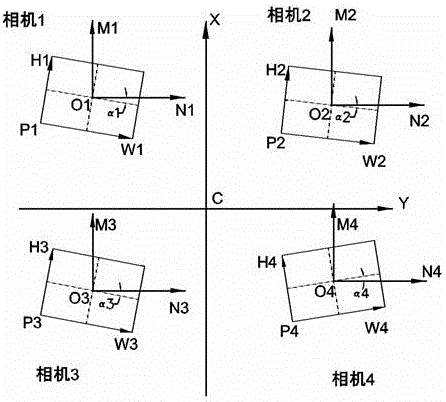
[0046] In the first stage, the internal parameters of each camera in the camera group and the camera installation angle are calibrated.
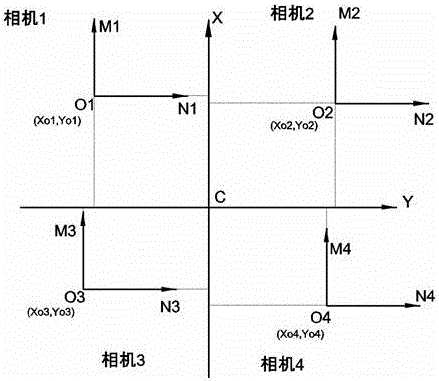
[0047] In the second stage, the position of the rotation center of the deviation correction platform in the output coordinate system of each camera in the camera group is calibrated, and the rotation coordinate system is established according to the rotation center of the deviation correction platform as a certain point after zeroing.
[0048] The third stage of calibration is based on the coincidence of the rotating coordinate systems of the first camera group and the second camera group, and the first camera group is mapped and calibrated by the second camera group.
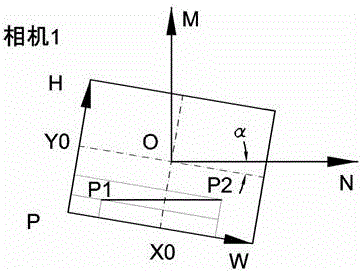
[0049] In this embodiment, the first-stage calibration adopts a two-point calibration method. The two-point calibration method is as follows, the image c...
Embodiment 2
[0064] Such as Figure 6 As shown, the multi-camera calibration and alignment bonding method in this embodiment, the calibration process includes: the second camera group calculates the center A1 of the object to be bonded, the first camera group calculates the center A2 of the target object; The deviation angle between the bonding object and the target object , the deviation distance A between the center of the fitting and the center of the target object, the deviation distance A(Xa,Ya) rotation deviation angle After point B(Xb,Yb), is the offset of an alignment fit, and the calculation algorithm is:
[0065] .
[0066] Alignment and fit correction amount calculation algorithm: Relative coordinate algorithm is adopted, that is, the deviation distance can be converted into a point in the rotating coordinate system. One-time alignment and fitting algorithm, which calculates the offset to be run, runs in place and fits once, and does not need to collect images again to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More