

Triple-speed tire grabbing robot
A technology of robots and tires, applied to manipulators, manufacturing tools, chucks, etc., can solve problems such as low efficiency, inconvenience, and short stretching length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing, describe in detail the structural setting and operation principle of the present invention, detailed description is as follows:
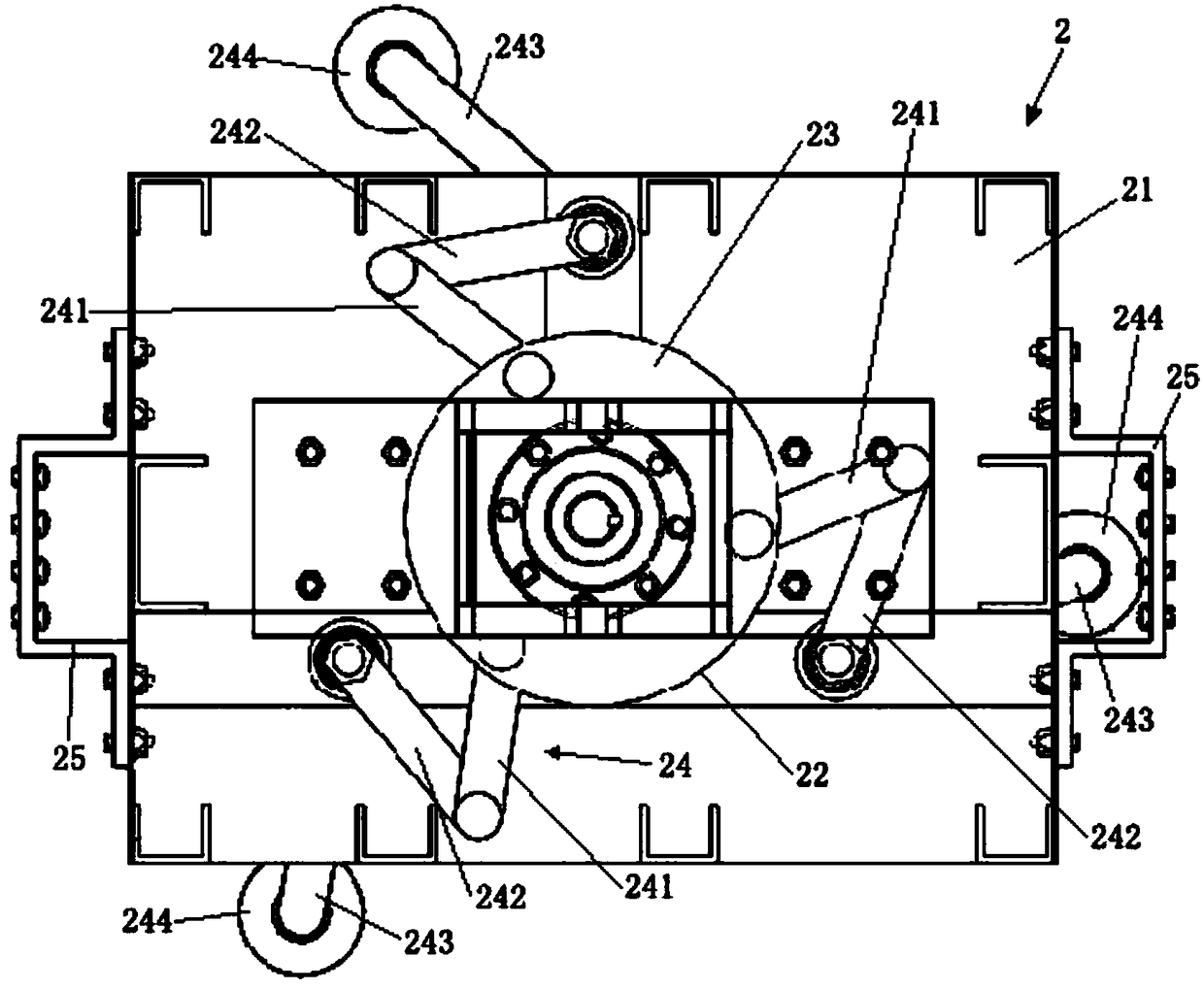
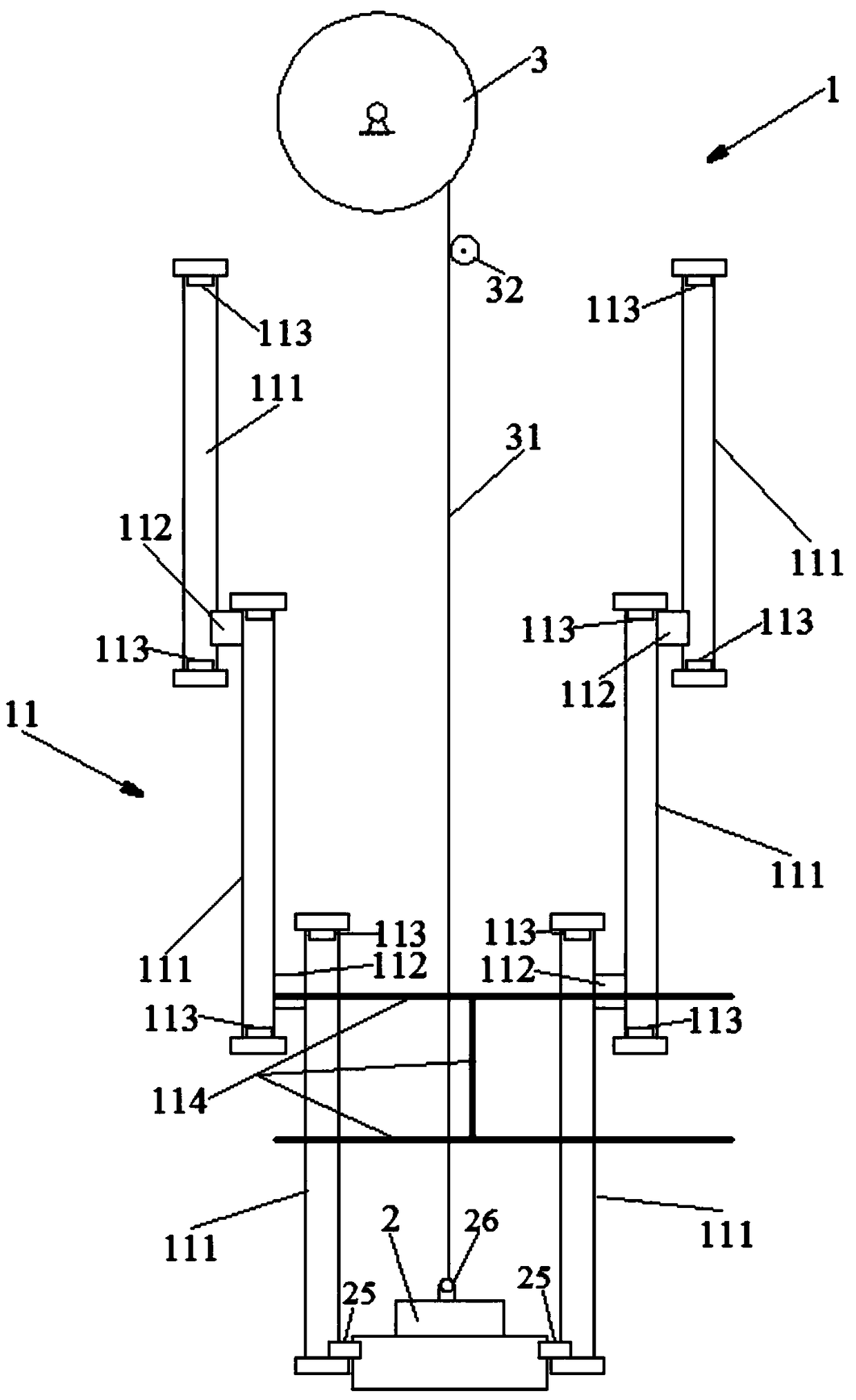
[0022] The triple-speed tire grabbing robot includes a lifting part 1 and a grabbing part 2. The lifting part 1 includes two sets of symmetrically arranged guide rail chains 11. The guide rail chain 11 includes three linear guide rails 111. The grabbing part 2 is fixedly connected to the lifting part 1. On the lowermost linear guide rail 111 , the upper end of the lifting part 1 is also provided with a pulley 3 with a belt 31 , which is located between two groups of guide rail chains 11 .
[0023] The linear guide rail 111 is provided with sliders 112, wherein one section of the linear guide rail 111 is used as an intermediate body to connect the other two sections of the linear guide rail 111 to both ends of the head and the tail respectively through the slider 112, and the two ends of the linea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More