Charging device butt joint method based on visual mark
A charging device and visual technology, applied in the direction of circuit devices, battery circuit devices, measuring devices, etc., can solve the problems of reducing the convenience of users and not being able to realize the automatic charging of intelligent robots, so as to achieve automatic charging and improve the convenience of use Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
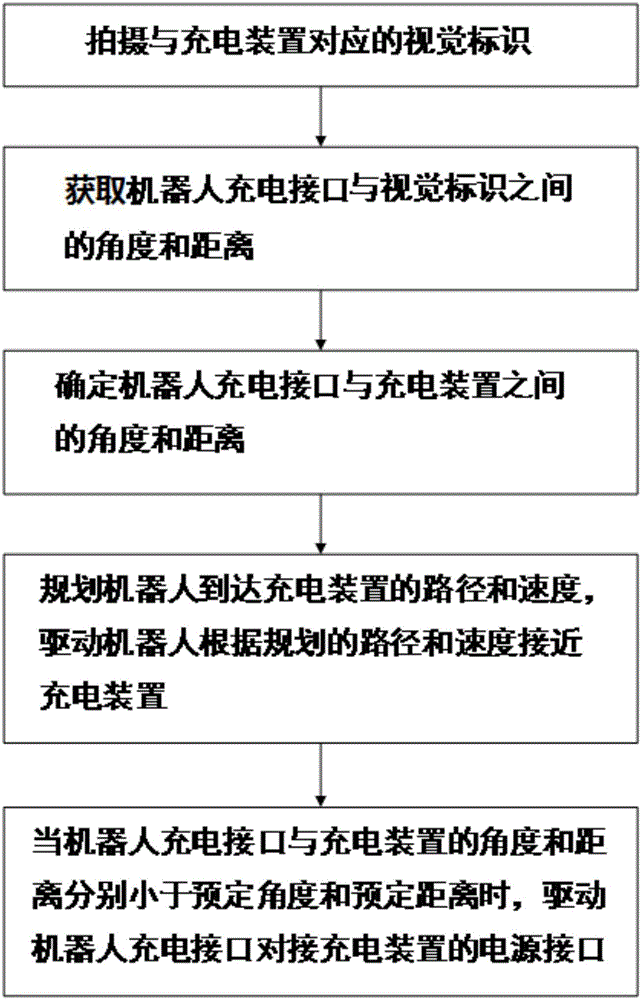
[0018] figure 1 A flow chart of a method for visually identifying a docking charging device according to an embodiment of the present invention is shown.
[0019] In this embodiment, the method for docking a charging device based on visual identification according to the present invention may include the following steps:
[0020] Step 1, photographing the visual identification corresponding to the charging device;
[0021] Step 2, based on the visual calibration parameters of the camera and the captured visual identification image, the angle and distance between the charging interface of the robot and the visual identification are obtained;
[0022] Step 3, determining the angle and distance between the charging interface of the robot and the charging device according to the angle and distance calculated in step 2 and the positional relationship between the visual sign and the charging device;
[0023] Step 4, planning the path and speed for the robot to reach the charging d...
Embodiment 2
[0044] According to another embodiment of the present invention, a method for docking a charging device based on visual identification is provided. The method may include the steps of:
[0045] Step 1, photographing a visual sign corresponding to the charging device, and obtaining the angle and distance between the charging interface of the robot and the visual sign based on the visual calibration parameters of the camera and the captured visual sign image;
[0046] Step 2, determining the angle and distance between the charging interface of the robot and the charging device according to the angle and distance calculated in step 1 and the positional relationship between the visual sign and the charging device;
[0047] Step 3, taking another visual sign corresponding to the charging device, and obtaining the angle and distance between the charging interface of the robot and the other visual sign based on the visual calibration parameters of the camera and the captured image of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More