Running device of human-machine cooperative robot
A human-machine cooperation and walking device technology, applied in the field of robots, can solve the problems of difficult processing, inaccurate transmission, complex structure, etc., and achieve the effects of low cost, few parts, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
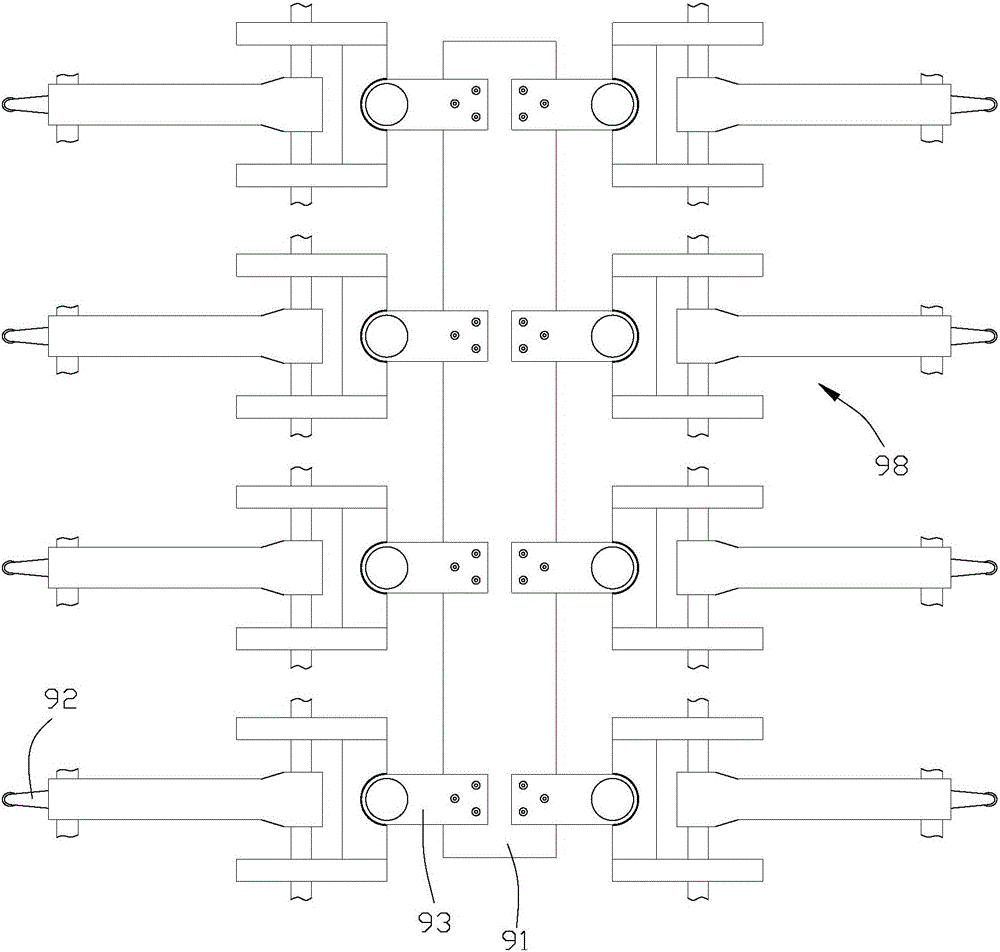
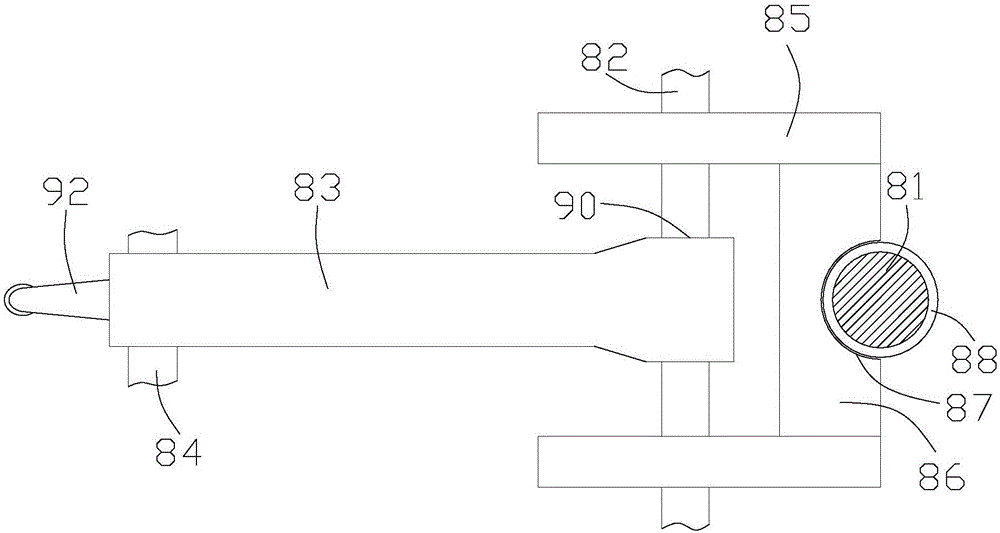
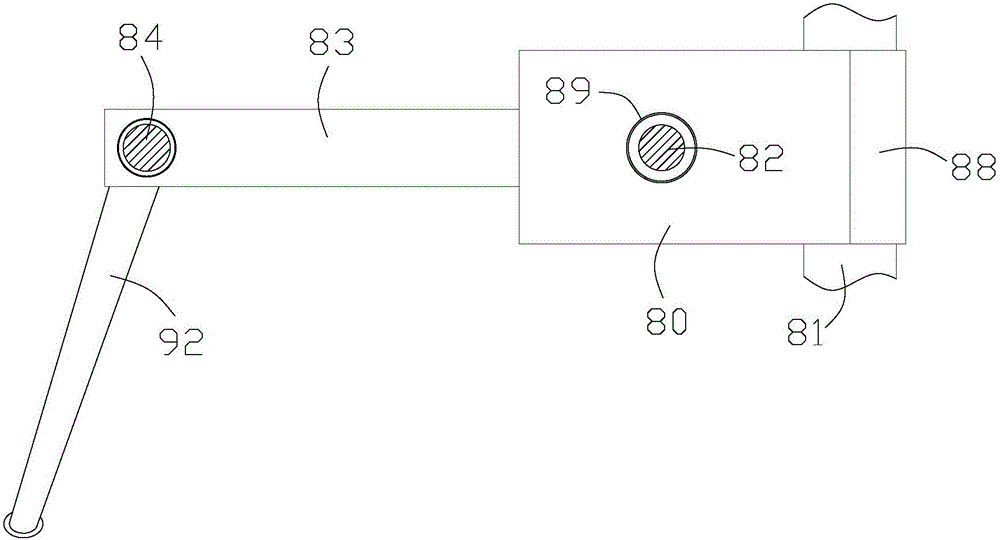
[0017] Combine below figure 1 , figure 2 and image 3 Introduce the present invention in detail:
[0018] The walking device of the human-machine collaborative robot includes a walking beam 91, several joints 98 are respectively arranged on both sides of the walking beam, and a walking part 92 driven by the joint is arranged on one side of each joint, and the other side of each joint is connected to One end of a connecting beam 93 is hinged, and the other end of the connecting beam is fixedly connected to the walking beam, so that the joint can drive the walking parts to walk in three-dimensional space, meeting the walking requirements of the human-machine collaborative robot.
[0019] Specifically, each joint includes a housing 80, one side of the housing is fixedly connected with a vertical first shaft 81, one end of the first shaft is rotatably connected to the one end of the connecting beam, and the other end of the first shaft is connected by The reducer drives the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More