

A computer vision-based student tracking method and device
A computer vision and student technology, applied in the field of computer vision, can solve problems such as inaccurate target outlines, and achieve the effect of low difficulty and low time complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
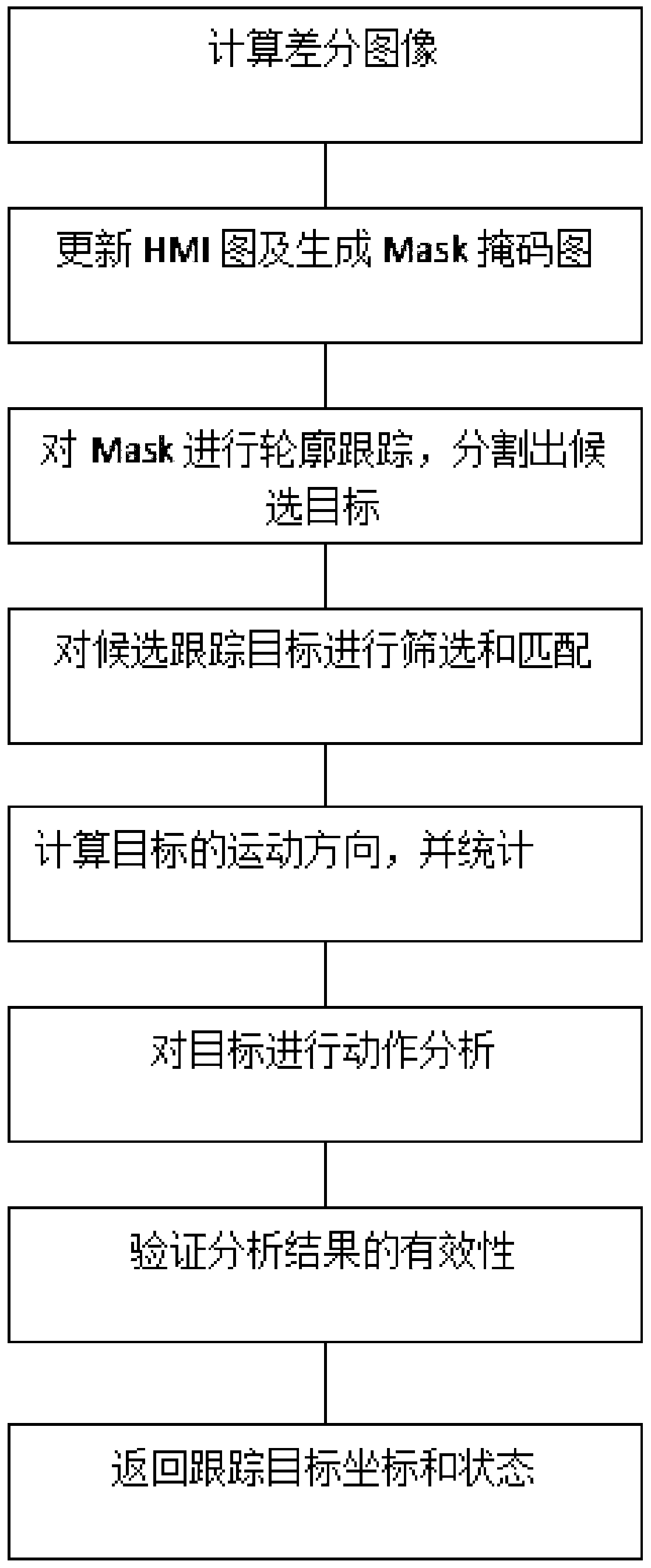
[0072] S5: After the matching process is completed, the motion direction is calculated on the HMI image for all tracking target ROI areas. The specific implementation is as follows:
[0073] Sub-step (1): Calculate the motion speed in the x direction, scan the HMI image line by line according to the direction from left to right, when a non-zero point is found, record the point coordinates as startX, and the HMI value is lastV;
[0074] Sub-step (2): Continue to scan to the right until the HMI value is not equal to lastV, the coordinate of this point is k, and the value is currV, and the movement speed of the pixel at the current position is calculated as:
[0075] Vn=(k-startX) / (currV-lastV);
[0076] Update startX to k, lastV to currV, repeat substep (2);
[0077] Sub-step (3): according to the motion speed of all pixels, calculate the average speed Vx of the x direction of this ROI area;
[0078] In particular, for the speed calculation in the y direction, it is the same ...
Embodiment approach
[0088] In order to ensure the validity of the judgment of standing up and sitting down, it is necessary to verify the result of step S6. This method proposes to use a circular linked list to save the historical image as the background, and calculate the difference between the current frame and the background of the target area to determine the difference between the standing up and the standing up. To verify with the sit down action, the implementation of the circular linked list is as follows:
[0089] Sub-step (1): create a circular linked list that includes k images, initialize all pixel values to 0, set a variable count of the number of statistical frames, initialize to 0, and k is an experience value, k=15 in the present embodiment;
[0090] Sub-step (2): Each time the algorithm receives a frame, the count is accumulated by 1. When the count is a multiple of a, the current image is added to the first position of the circular linked list; where a is determined according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More