

A control method, device and system for an intelligent robotic arm
A technology of intelligent machinery and control methods, applied in the field of robots, can solve the problems of complex structure and high cost, and achieve the effect of improving versatility, saving cost and calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is described further:
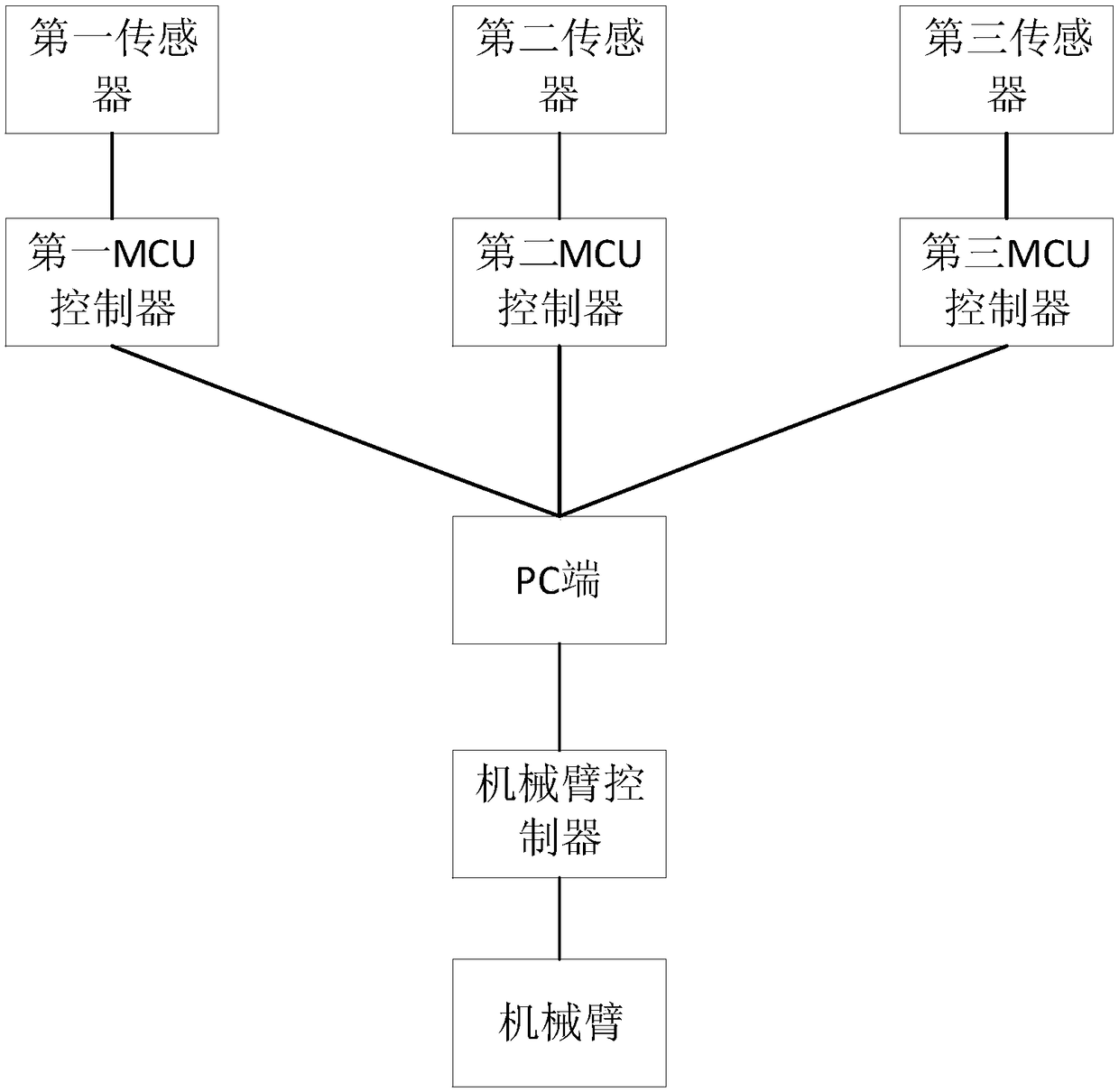
[0041] Such as figure 2 As shown, Embodiment 1 provided by the present invention is a control system for an intelligent robotic arm, which includes a first sensor installed on the back of the hand, a second sensor installed above the forearm, a third sensor installed above the upper arm, and There are three MCU controllers, which are respectively recorded as the first MCU controller, the second MCU controller and the third MCU controller, and there is no relationship between these three MCU controllers. The first sensor is electrically connected to the first MCU controller, the second sensor is electrically connected to the second MCU controller, and the third sensor is electrically connected to the third MCU controller. The first MCU controller is used to acquire data sent by the first sensor, the second MCU controller is used to acquire data sent by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More