

Rapid object recognition method for mobile robot based on deep learning
A mobile robot and object recognition technology, applied in character and pattern recognition, instruments, computer components, etc., can solve problems such as decreased operating efficiency, and achieve the goal of overcoming poor accuracy, ensuring timeliness and accuracy, and ensuring processing efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] Through the following description of the embodiments, it will be more helpful for the public to understand the present invention, but the specific embodiments given by the applicant cannot and should not be regarded as limitations on the technical solutions of the present invention, any components or technical features Changes to the definition and / or formal but not substantive changes to the overall structure should be regarded as the scope of protection defined by the technical solutions of the present invention.
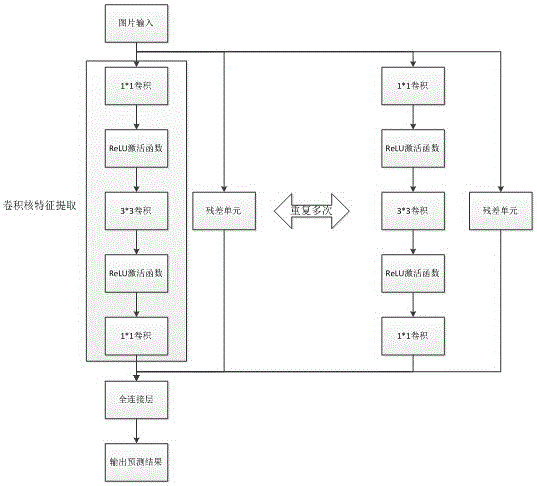
[0026] Step 1. Mobile picture acquisition: The mobile picture acquisition module obtains the visual data perceived by the camera during the movement of the robot. The visual data includes two parts: the depth picture and the ordinary RGB color picture.
[0027] Step 2, image data preprocessing: the image data preprocessing module preprocesses the image obtained in the image acquisition module, first generates the corresponding color image and depth image, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More