

Automobile driving state estimation method with influence of rolling considered
A driving state, automobile technology, applied in the direction of calculation, design optimization/simulation, special data processing applications, etc., can solve the problem that the control accuracy is difficult to be guaranteed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0046] A method for estimating the driving state of a vehicle considering the influence of roll provided by the invention comprises the following steps:
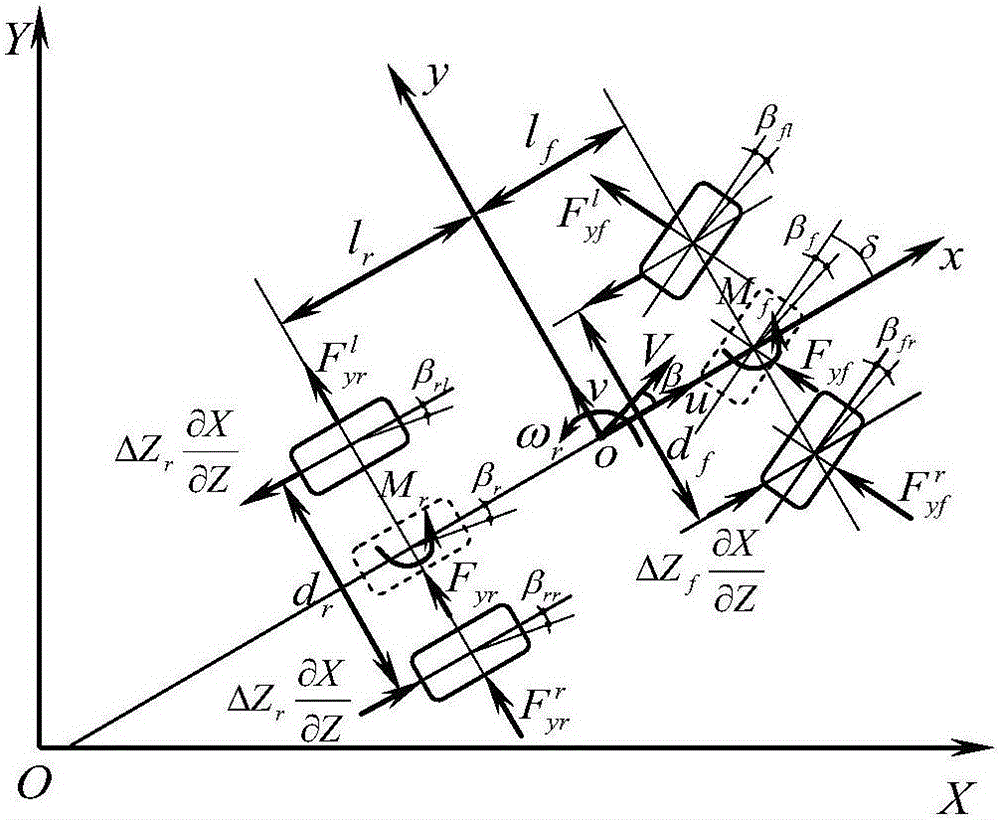
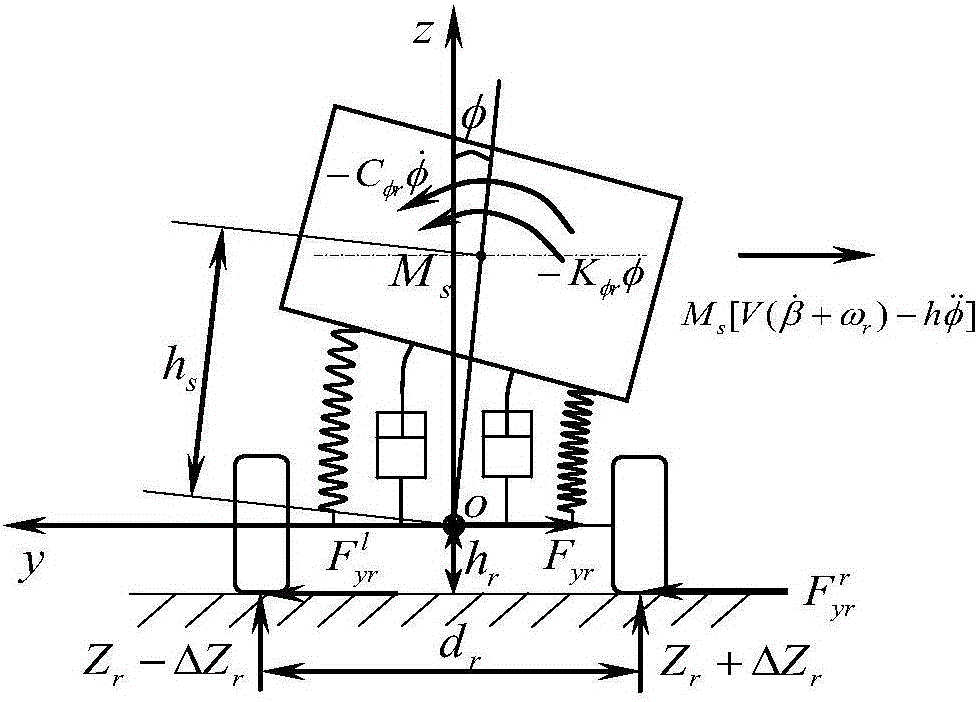
[0047] like figure 1 , 2 As shown, considering factors such as the change of tire characteristics caused by the change of tire load on the left and right wheels caused by the rolling motion and the influence of the tire righting moment, on the basis of the two-degree-of-freedom simplified model of the two-wheeled motorcycle, Based on the nonlinear three-degree-of-freedom car model, the differential equations including the center of mass motion, yaw motion and roll motion of the car are derived as follows:
[0048] The force balance equation in the Y direction:
[0049] M V ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More