

Unmanned aerial vehicle target positioning method and system
A target positioning and UAV technology, applied in the field of UAV target positioning methods and systems, can solve the problems of low contrast blur or even occlusion, changeable imaging conditions, complex flight characteristics, etc. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
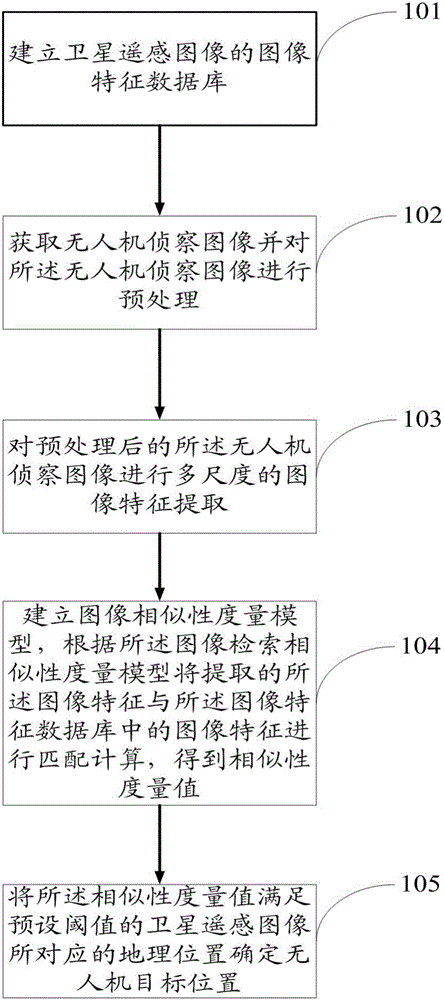
[0045] figure 1 It is a schematic flow diagram of the method of the embodiment of the present invention, such as figure 1 As shown, a UAV target positioning method includes:
[0046] Step 101: establishing an image feature database of satellite remote sensing images;
[0047] Step 102: Acquiring the UAV reconnaissance image and preprocessing the UAV reconnaissance image;
[0048] Step 103: performing multi-scale image feature extraction on the preprocessed UAV reconnaissance image;
[0049] Step 104: Establish a granular computing-based image retrieval similarity measurement model, and perform matching calculations on the extracted image features and image features in the image feature database according to the image retrieval similarity measurement model to obtain a similarity measurement value;
[0050] Step 105: Determine the geographic location corresponding to the satellite remote sensing image whose similarity metric value satisfies a preset threshold as the UAV targe...
Embodiment 2
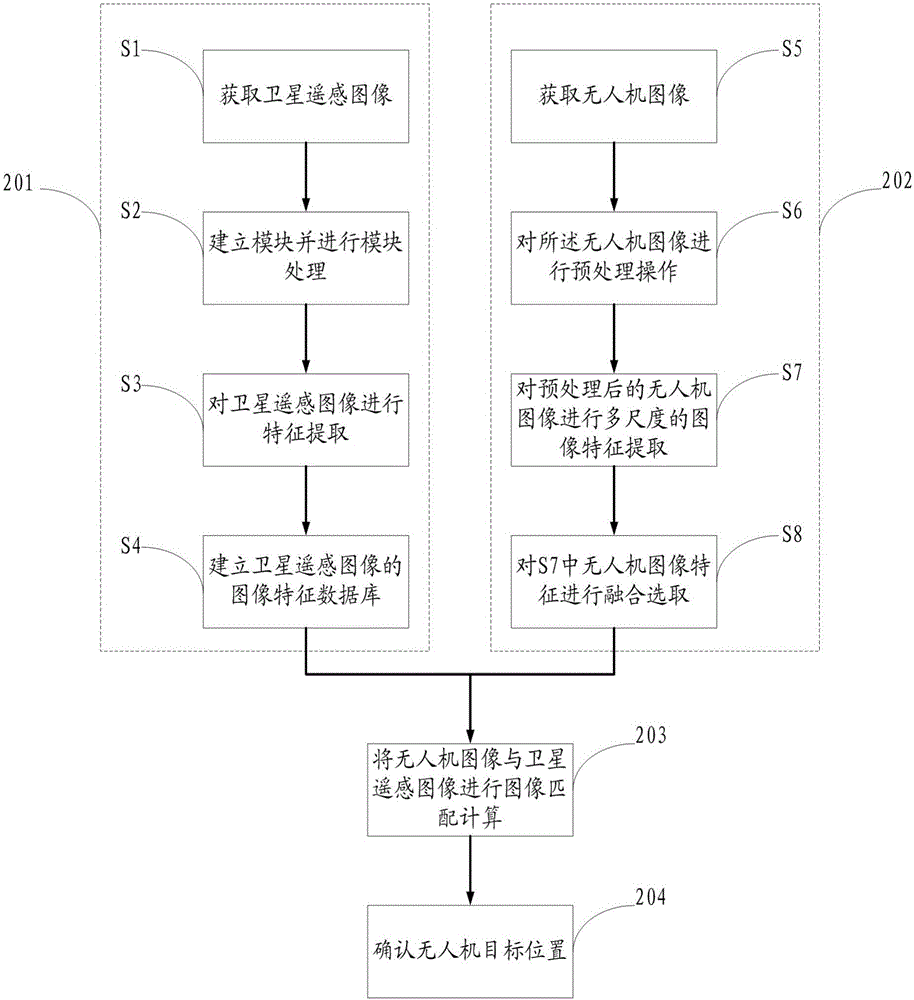
[0052] figure 2 It is a schematic flow diagram of the method of Embodiment 2 of the present invention, such as figure 2 As shown, a UAV target positioning method includes:
[0053] Step 201: Establishing an image feature database of satellite remote sensing images, the establishment of an image feature database of satellite remote sensing images includes the following operations:
[0054] S1: Obtain satellite remote sensing images;
[0055] S2: Establish a module and perform module processing, and accurately calculate the corresponding geographic location of the satellite remote sensing image by splicing small pieces of maps;
[0056] S3: performing feature extraction on the satellite remote sensing image, extracting the image features of the remote sensing satellite image, and correspondingly storing the image feature of the remote sensing satellite image and the corresponding geographic location;
[0057] S4: Establish an image feature database of satellite remote sensi...
Embodiment 3
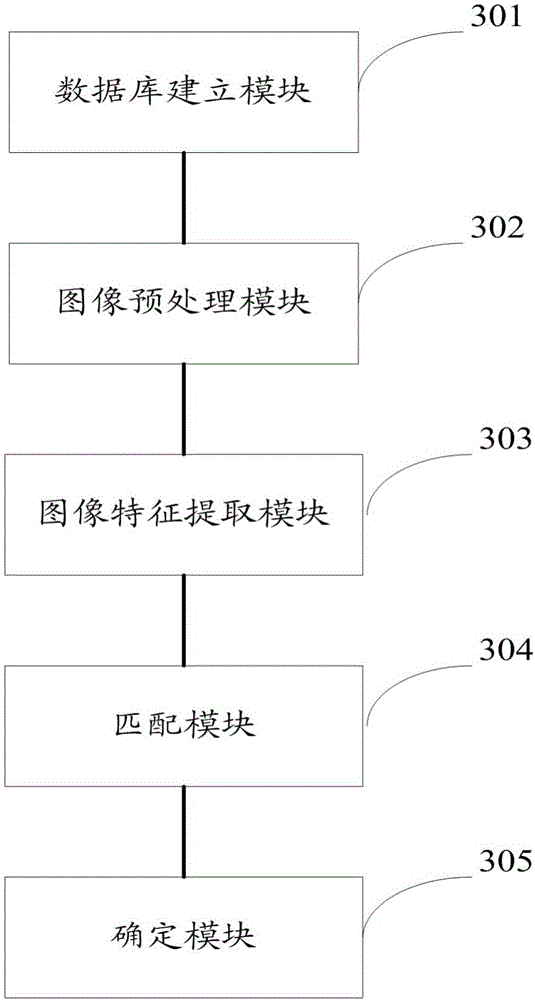
[0079] image 3 It is a schematic diagram of the system module of Embodiment 3 of the present invention, such as image 3 As shown, a UAV target positioning system includes:
[0080] Database building module 301, used to set up an image feature database of satellite remote sensing images;
[0081] An image preprocessing module 302, configured to acquire unmanned aerial vehicle reconnaissance images and preprocess the unmanned aerial vehicle reconnaissance images;
[0082] An image feature extraction module 303, configured to perform multi-scale image feature extraction on the preprocessed UAV reconnaissance image;
[0083] The matching module 304 is configured to establish an image retrieval similarity measurement model based on granular computing, and perform matching calculation on the extracted image features and image features in the image feature database according to the image retrieval similarity measurement model to obtain similarity measure of sex;
[0084] A dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More