

Four-freedom-degree robot mechanism capable of achieving three-dimensional translation and one-dimensional rotation
A robot and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of a large number of branches, unfavorable dynamic response characteristics of the mechanism, and large weight of the moving platform, so as to achieve a clear movement mode and reduce branch chains. Quantity, simple and compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with embodiment the present invention is described in further detail:
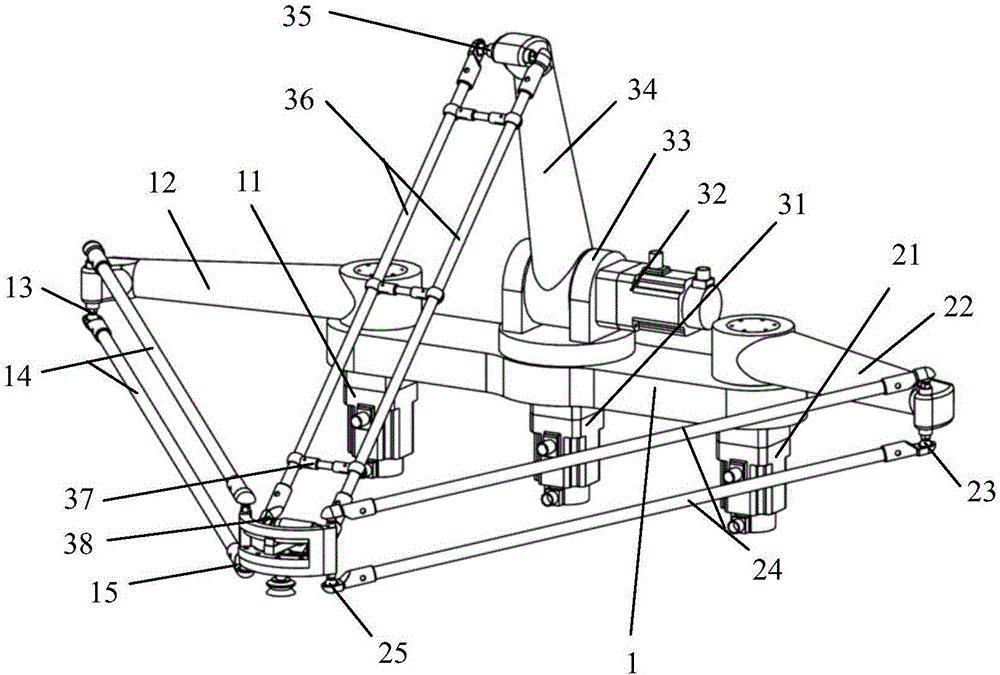
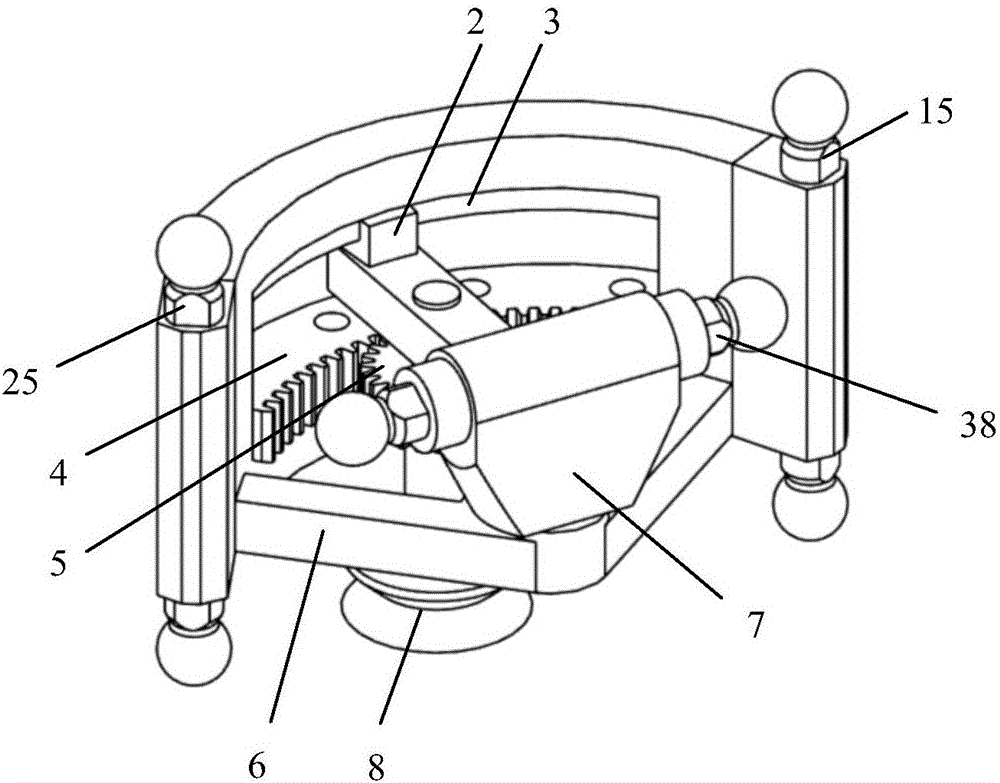
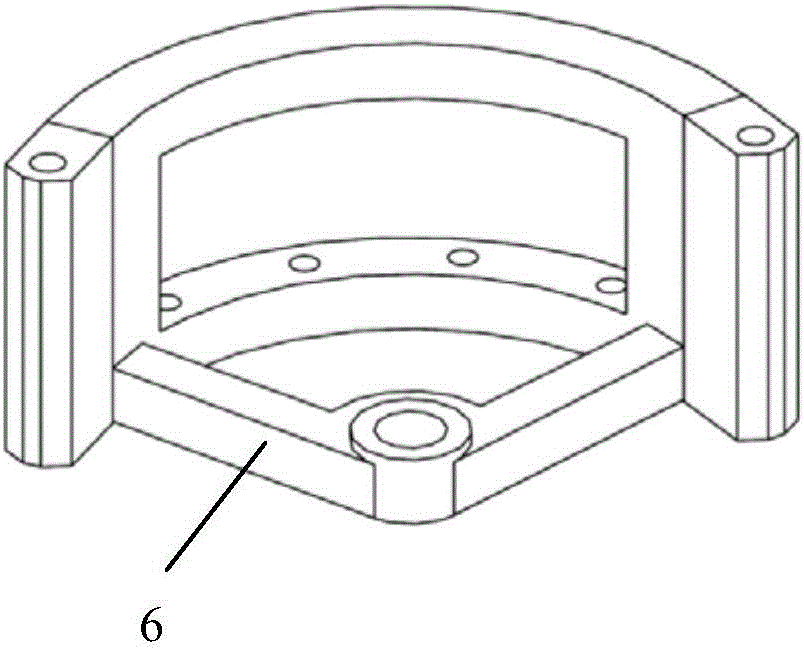
[0023] combined with Figure 1-4 , a four-degree-of-freedom robot mechanism that can realize three levels and one rotation, including a fixed frame 1, a moving platform, and a first branch chain, a second branch chain, and a third branch chain connecting the fixed frame 1 and the moving platform. The structure of the first branch chain and the second branch chain is exactly the same, and they are distributed on both sides of the third branch chain;
[0024] The first branch chain includes a first driving device 11, a first near frame rod 12, a first upper connecting shaft 13, two parallel and equal long first far frame rods 14 and a first lower connecting shaft 15; The first driving device 11 is fixedly connected with the fixed frame 1, and one end of the first frame rod 12 is rotationally connected with the fixed frame 1, and is fixedly connected with the driving end of the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More