

Lane selection system and method for autonomous vehicle
A technology of automatic driving and lanes, applied in the traffic control system of road vehicles, traffic control systems, instruments, etc., can solve the problems of inability to choose intelligent vehicles, lack of intelligent perception and intelligent path planning capabilities, and achieve the effect of avoiding traffic congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] specific implementation plan
[0023] Hereinafter, the present invention will be described in detail with reference to the accompanying drawings.
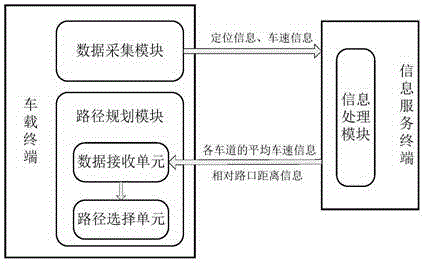
[0024] The lane selection system for self-driving vehicles of the present invention includes a vehicle-mounted terminal and an information service terminal, and the vehicle-mounted terminal includes a data collection module and a path planning module, such as figure 1 shown.
[0025] The data collection module should be able to collect vehicle location information and vehicle speed information, and send them to the information service terminal.
[0026] The information service terminal includes an information processing module. By receiving the vehicle speed information of the vehicle that can send data information, the traffic flow speed information in the whole area is obtained to form a real-time traffic flow speed information database. speed And send it to the path planning module of the vehicle terminal according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More