

A unified automatic driving horizontal planning method and system
A technology for automatic driving and planning systems, applied in control/regulation systems, motor vehicles, non-electric variable control, etc., to ensure optimality, simplify upper-level behavior decision-making modules, and avoid local minima problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
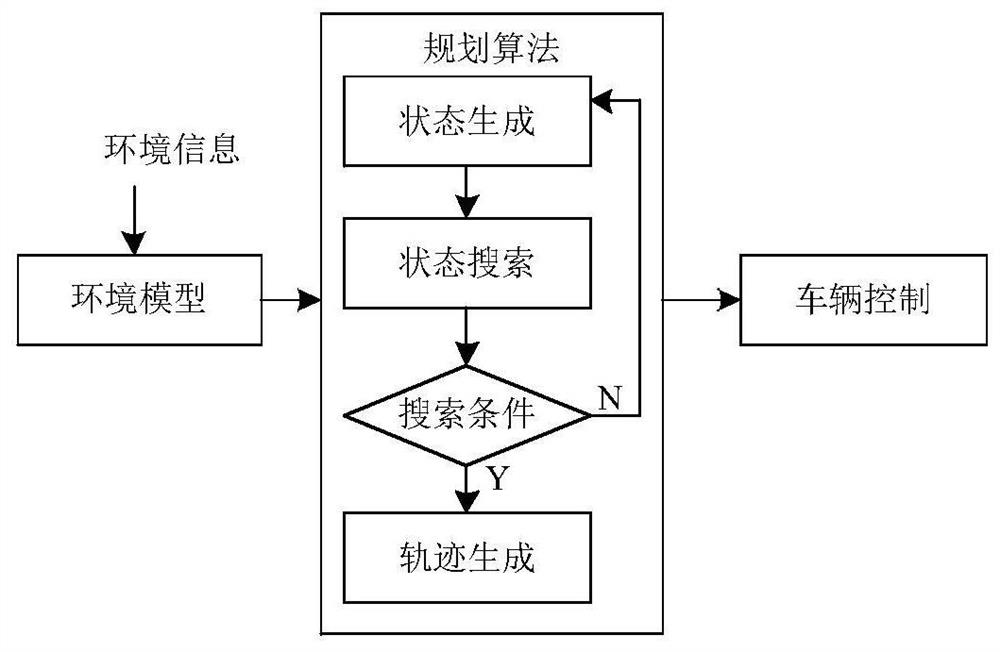
[0035] The invention provides a unified automatic driving lateral planning system and method. Such as figure 1 As shown, it includes three sub-modules of environment model, planning algorithm and vehicle control. Environmental model: According to the environmental perception information, and according to the traffic rules and the nature of traffic participants, a unified local environmental model is constructed to describe the surrounding environment information of the vehicle in a unified way, reflecting the potential danger around the vehicle; planning algorithm: considering the incompleteness of the vehicle Constraints, safety and comfort requirements, and based on the environment model, plan the executable trajectory in real time during the driving process of the vehicle; vehicle control: used to execute the planning results output by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More