

Mechanical arm obstacle avoidance method based on multiple sensors, and mechanical arm
A multi-sensor, robotic arm technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve high obstacle avoidance accuracy, avoid local minimum problems, and high analysis accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] This embodiment discloses a multi-sensor based robotic arm for grabbing slides, one or more laser sensors and a vision sensor are installed at the end of the mechanical arm, the one or more laser sensors and The vision sensors all send the collected signals to the central processing unit, and the central processing unit analyzes the path of the manipulator based on the above signals, generates control signals and sends them to the controller, so as to control the movement of the manipulator according to the planned path.
[0058]If there is only one laser sensor, it should be located directly above or directly below the visual sensor, and as close as possible to the visual sensor; Above or directly below, as close as possible to the vision sensor, to ensure that the distance measured by the laser sensor to the obstacle in front is approximately equal to the distance to the obstacle in the image acquired by the vision sensor, what you see is what you get.
[0059] The ce...
Embodiment 2
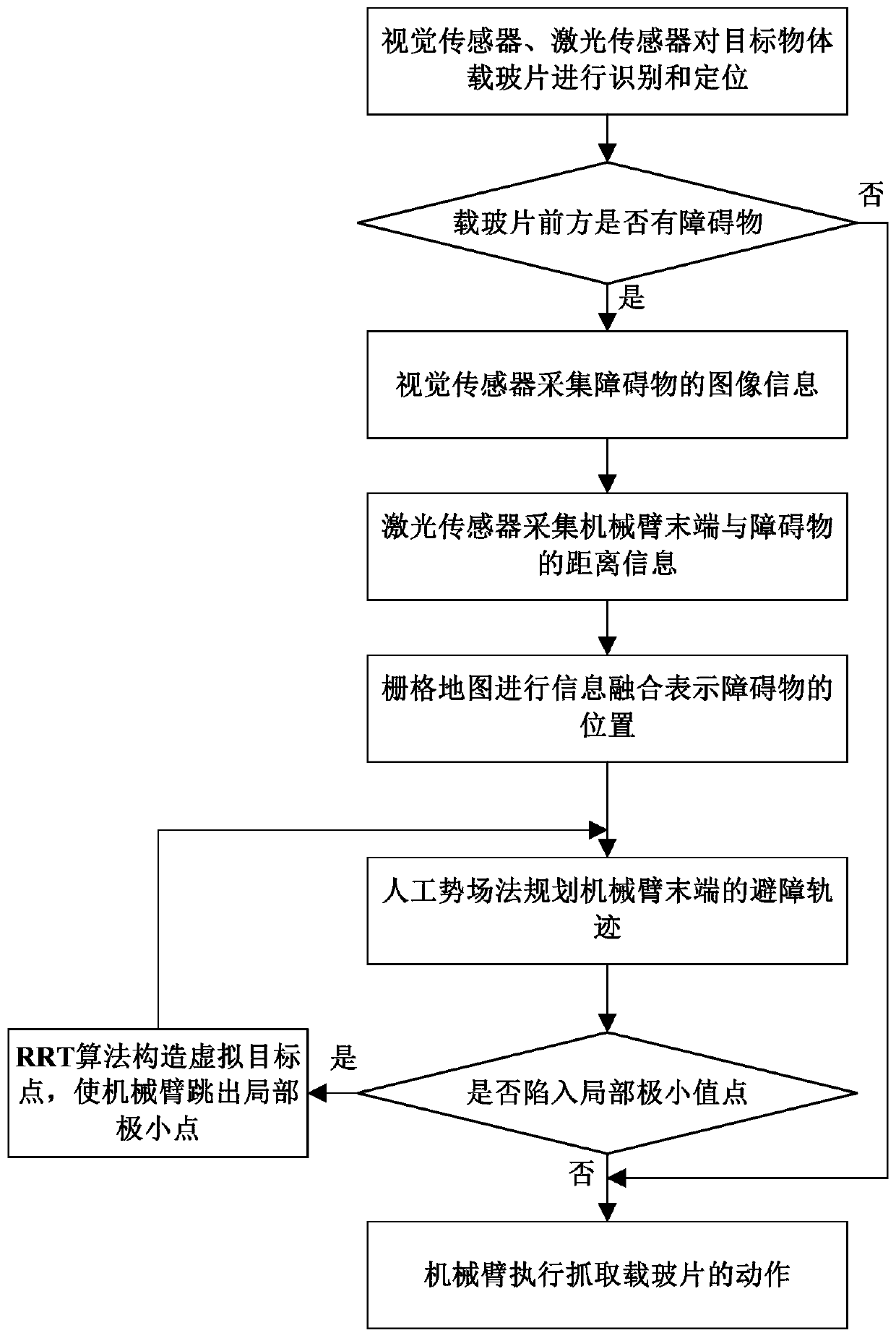
[0084] The purpose of this embodiment is to provide a multi-sensor based robot arm obstacle avoidance method for grasping slides, using the robot arm as described in the first embodiment.
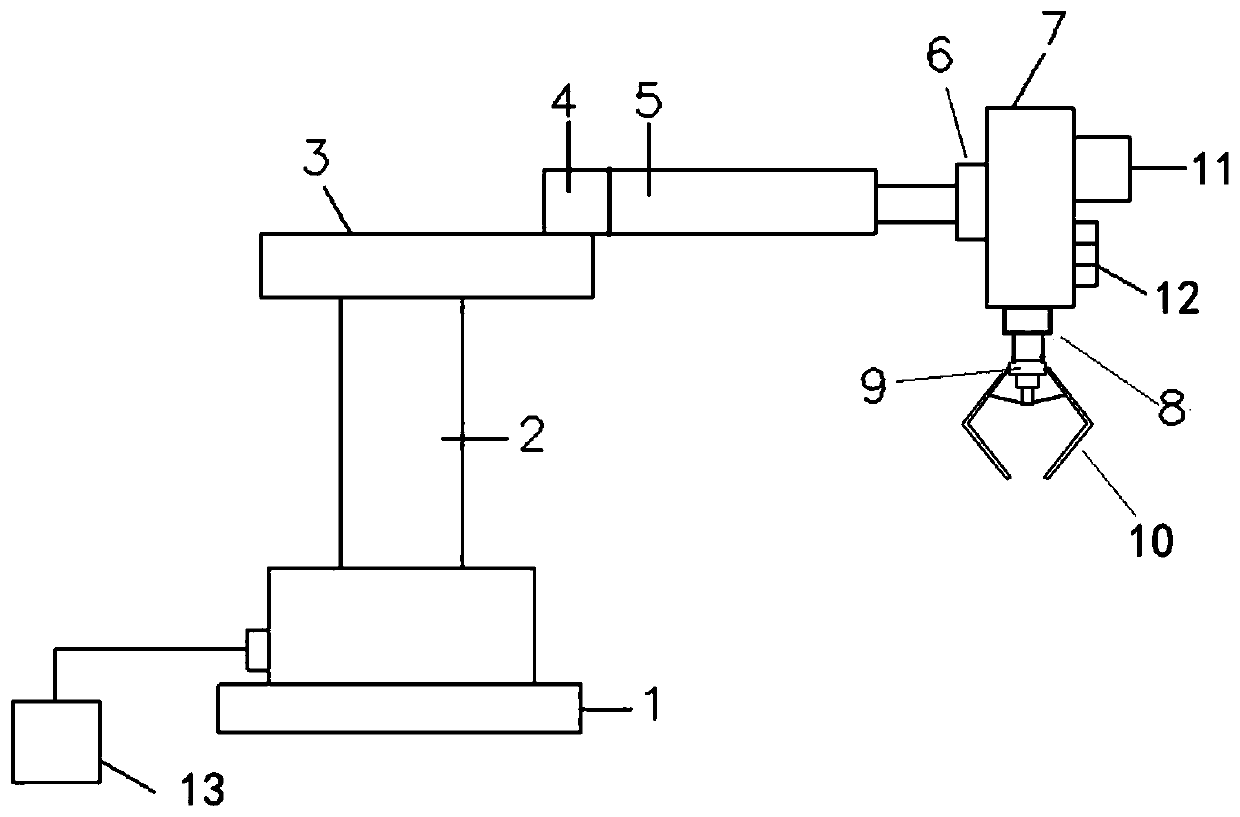
[0085] In this embodiment, a three-stage mechanical arm is used, such as image 3 As shown, it includes a base 1, the base 1 is provided with a support shaft 2, which is connected to the base 1 in rotation, the upper part of the support shaft 2 is fixedly connected with one end of the first arm 3, and the other end of the first arm 3 is connected with the first connecting part 4 Rotationally connected, the first connecting part 4 is fixedly connected to one end of the second arm 5, specifically, the second arm 5 is a telescopic hydraulic cylinder, one end of the cylinder body is fixedly connected to the first connecting part 4, and one end of the piston rod passes through the second arm. Two connecting parts 6 are connected with the third arm 7, and the end face of the other end of the thir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More