Cross-slider type four-chain three-level one-rotation high-speed parallel manipulator
A slider-type, four-chain technology, applied in the field of robotics, can solve the problems of uneven force, uneven force, large friction, etc., to achieve good overall structural stability, high motion accuracy, and uniform force Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, and the described specific embodiments are only for explaining the present invention, and are not intended to limit the present invention.
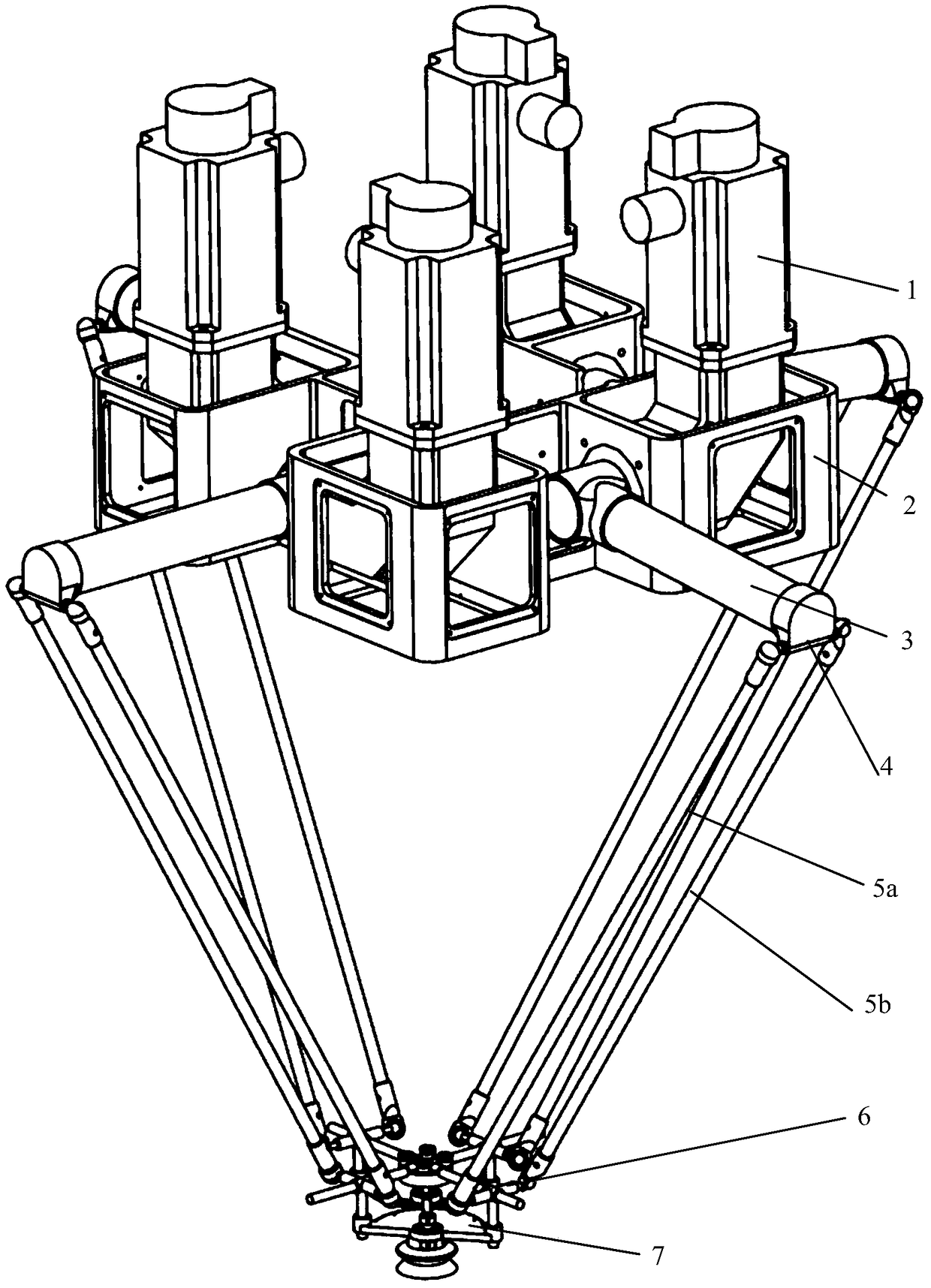
[0014] Such as figure 1 As shown, a cross slider type four branch chain three-level one-rotation high-speed parallel manipulator proposed by the present invention includes a fixed frame 2, a moving platform 7 and four motion branch chains with the same structure; There are four driving devices 1; four motion branch chains with the same structure are spatially distributed between the fixed frame 2 and the moving platform 7.
[0015] Such as figure 1 As shown, each kinematic branch chain is composed of a near frame bar 3, an upper connecting shaft 4, a far frame bar 5a, a far frame bar 5b and a lower connecting shaft 6. The far frame rod 5a and the far frame rod 5b are par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More