

Design method of multiple AGV (Automatic Guided Vehicle) unified dispatching system by upper computer
A design method and technology of dispatching system, applied in two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
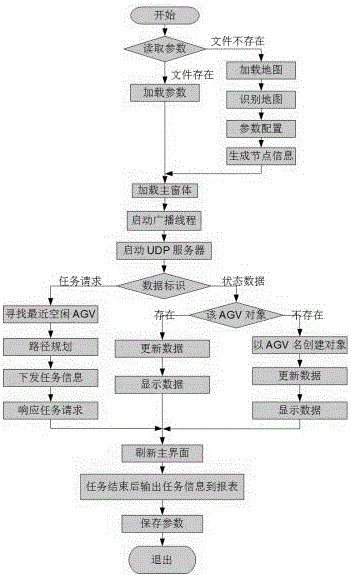
[0051] Combine below Figure 1 to Figure 8 The technical scheme of the present invention is further shown, and the specific implementation is as follows:
[0052] This embodiment provides a method for designing a unified dispatching system for a multi-AGV upper computer, including the following steps:
[0053] S1. Map import: first read the map and the configuration parameter file, if the map and the parameter file are not read or the file does not exist, a dialog box for selecting a map will pop up asking the user to import the map and set the configuration parameters;
[0054] S2. Map recognition: first identify the key nodes in the map, and then extract the connection between each node (that is, whether there is a direct path between two nodes);
[0055] S3. Map analysis: based on map recognition, analyze the connection relationship between each node and the weight between them;
[0056] S4. Status display: the system searches for the currently online AGV car, and when th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More