

Cooperative self-adaptive cruise control system algorithm based on traffic information
A technology of adaptive cruise and system algorithm, applied in the field of traffic network, can solve the problem of not being able to track the signal lights and traffic situation information ahead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] 1. Following car model
[0039] The control design of the CACC system is divided into upper and lower layer control: the upper layer calculates the expected acceleration a according to the distance, speed and other data received by the sensor des and passed to the lower layer executors. The underlying control is implementing a des It is necessary to control the accelerator opening and brake pressure through the inverse longitudinal dynamics model of the vehicle to achieve the desired acceleration a des .
[0040] In the actual process, the input a of the lower controller des and the actual output a can be represented by a first-order inertial system:
[0041]
[0042] τ is a time constant, which is 0.5 here.
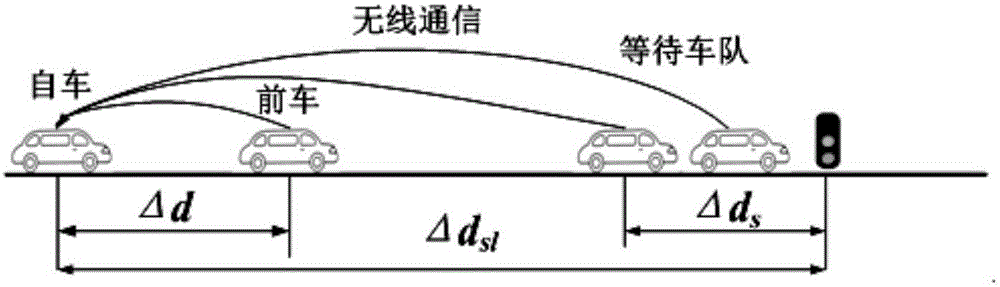
[0043] Such as figure 1 The schematic diagram of the longitudinal dynamic relationship between the self-vehicle, the vehicle in front and the team in front in the car-following system is shown, and the following three-order discrete state equation model o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More