

Transurethral surgical robot and control system
A surgical robot and control system technology, applied in surgical robots and other directions, can solve problems such as difficulty in meeting technical requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
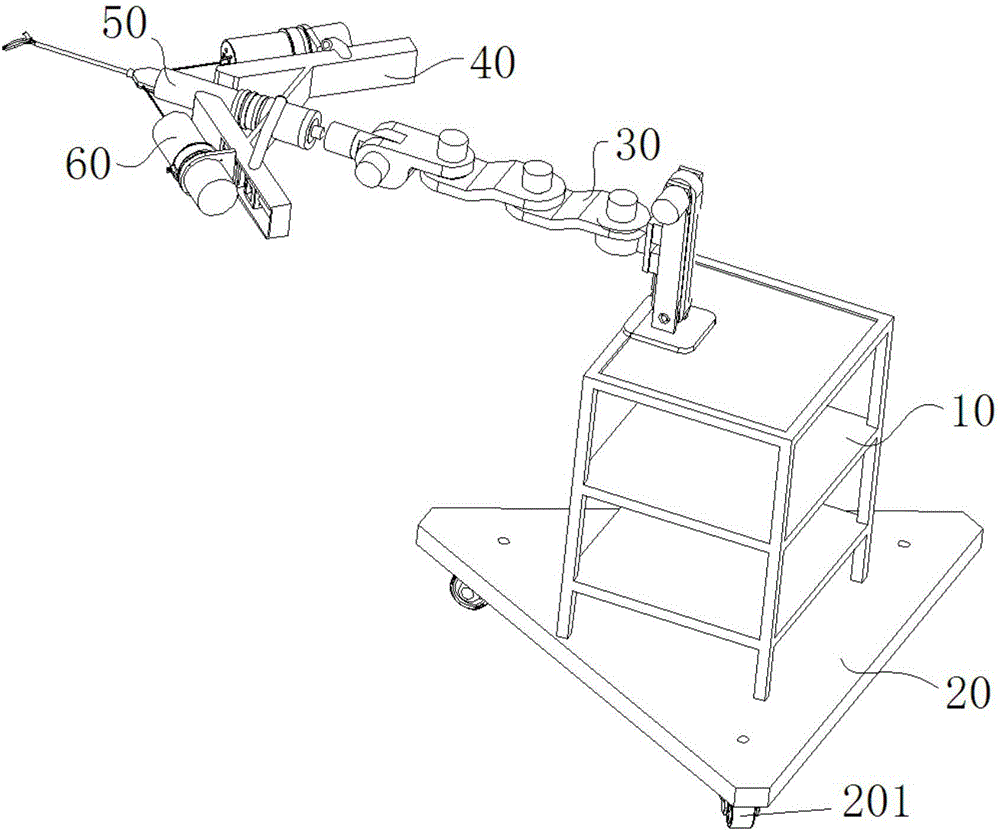
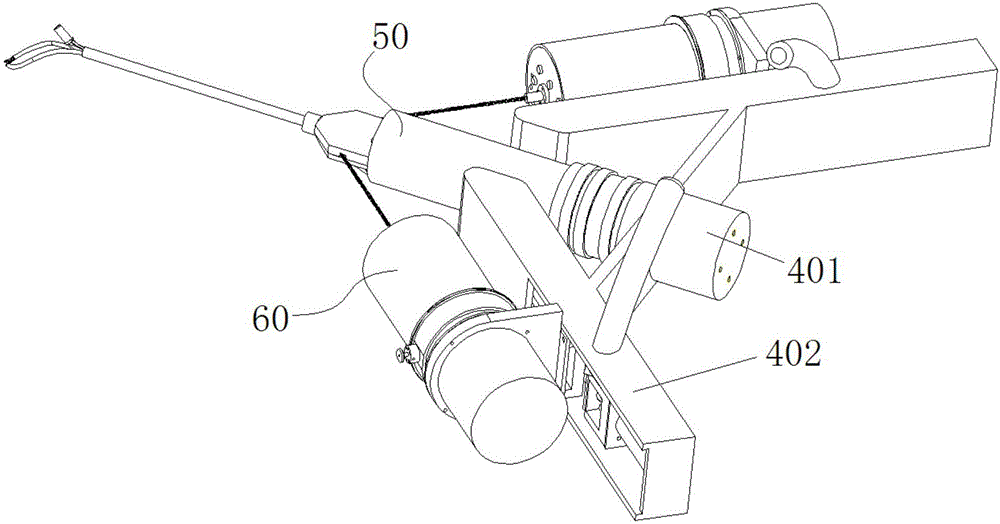
[0039] like Figure 1~3 As shown, the present embodiment includes a frame 10, a chassis 20 is fixedly connected to the bottom of the frame 10, a support 40 is connected to the top of the frame 10 through a transmission chain 30, and a cystoscope 50 and a cystoscope 50 are fixedly connected to the support 40. Two surgical tools 60 .
[0040] like Figure 4 As shown, the cystoscope 50 includes a mirror body 501 and a mirror body driving unit 502 .
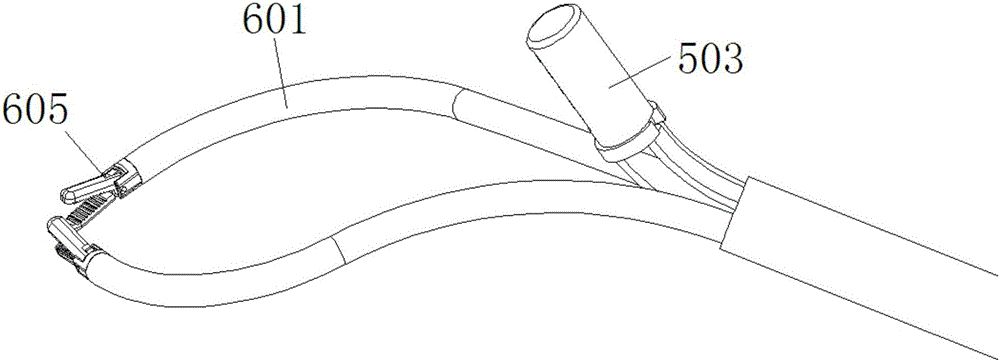
[0041] like Figure 4 , Figure 5As shown, the mirror body 501 includes a high-definition camera 503 carrying an illumination module, a fixed plate 504, two first structural bones 505, a second structural bone 506, a support member 507 and a thin-walled tube 508 with a circular cross section . Wherein, the two first structural bones 505 and one second structural bone 506 are evenly distributed in a triangular shape, and the front ends of the three are jointly fastened to one side of the fixing plate 504 . The other side of the ...
Embodiment 2
[0056] like Figure 22 As shown, in this embodiment, a control terminal 70 and a control cabinet 80 are added on the basis of the first embodiment. The control terminal 70 includes an upper computer 701, a display 702, two remote control devices 703 and two pedals 704, wherein the display 702, two remote control devices 703 and two pedals 704 are all electrically connected to the upper computer 701. The control cabinet 80 includes an industrial computer 801 , an adapter board 802 , multiple motor drivers 803 and a display 804 . The industrial computer 801 is electrically connected to the upper computer 701 and the adapter board 802 respectively, and the adapter board 802 is electrically connected to the motor driver 803 , the display 702 , the display 804 , and the cable 509 of the high-definition camera 503 . Each motor driver 803 is electrically connected to the motor 405 , the motor 303 , the motor 307 , the motor 309 , the motor 311 , the motor 313 , and the motor 315 . ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More