

Finger quick replacing structure of robot
A robot and finger technology, applied in the field of robot quick-change finger structure, can solve the problems of slow overall speed of changing the gripper, limited stroke of the robot gripper, and increased robot application cost, and achieves a simple and convenient disassembly and installation process, reduces investment costs, and Small footprint effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
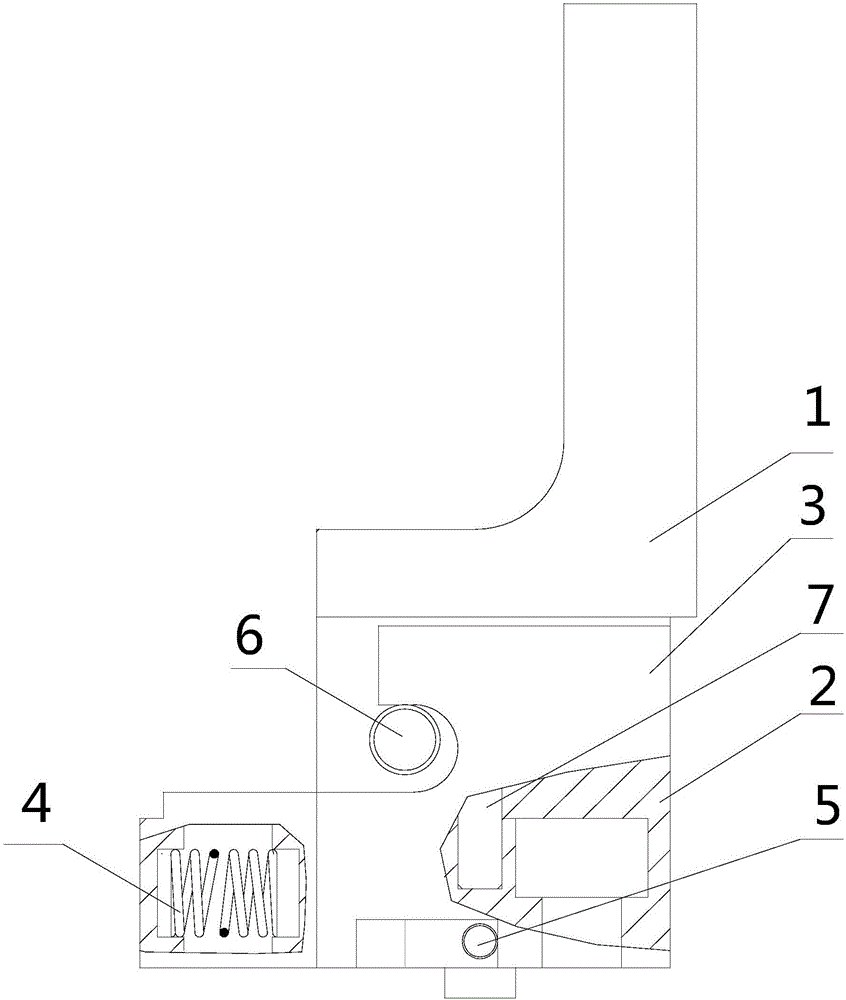
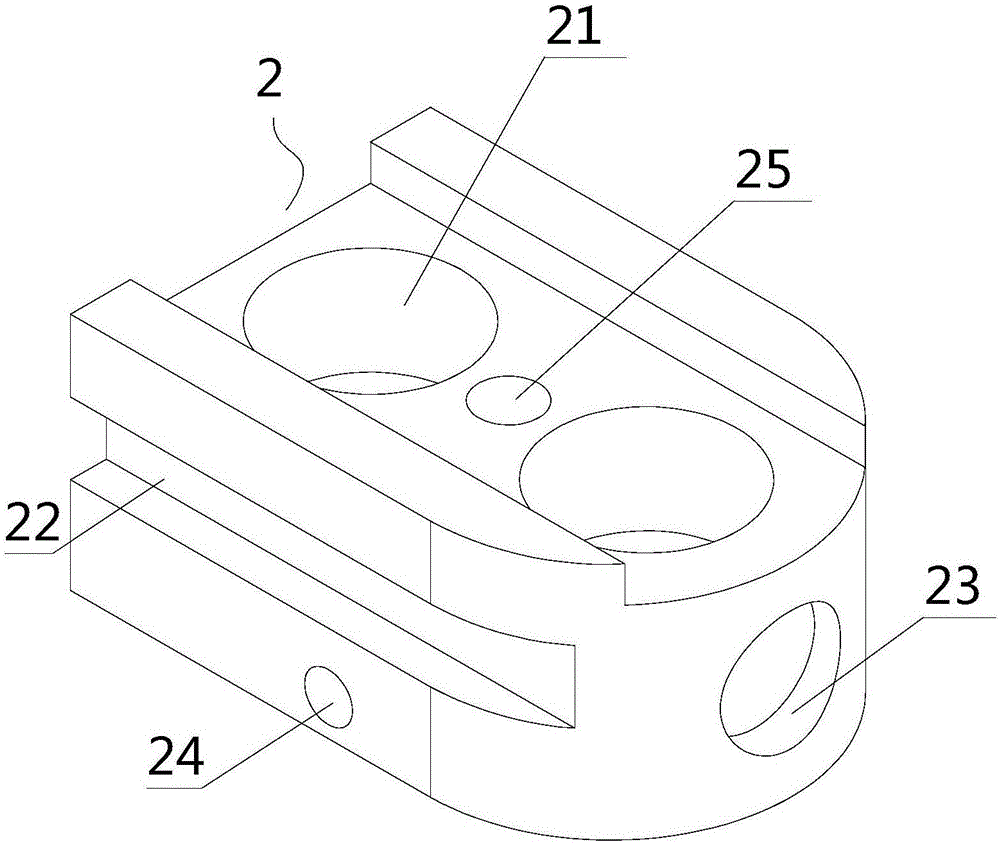
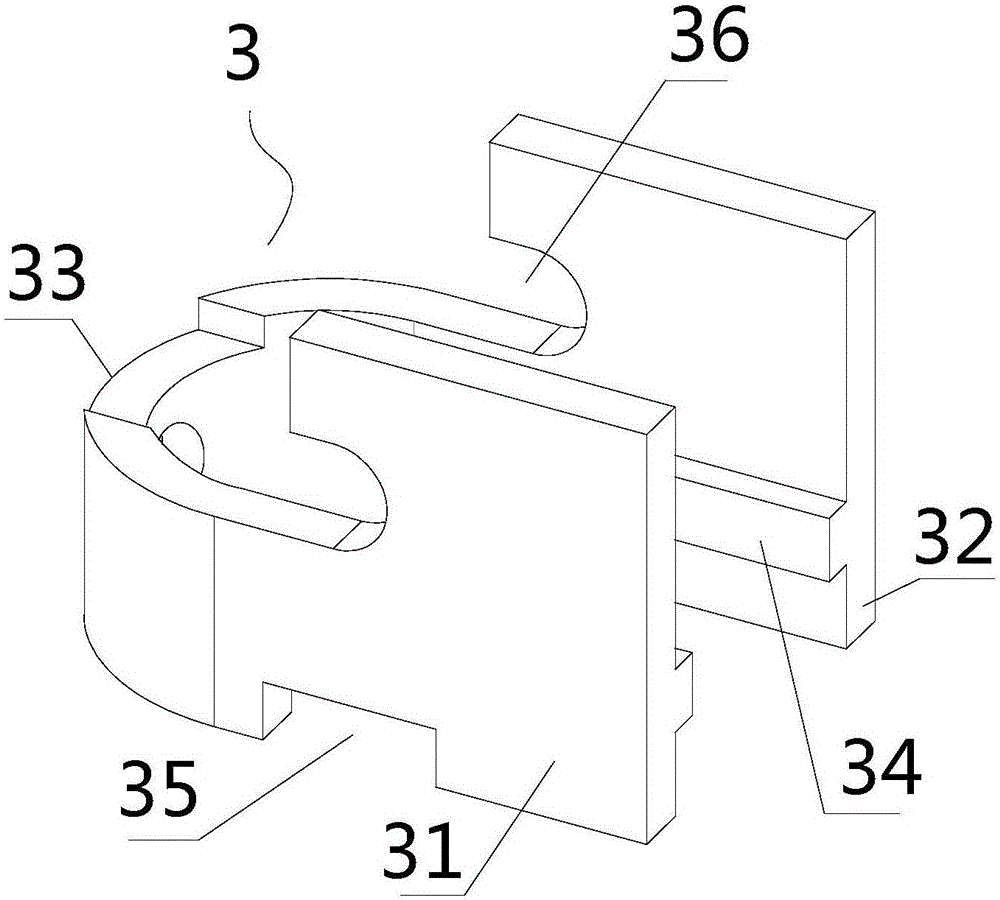
[0021] see Figure 1 to Figure 4 , this embodiment discloses a robot quick-change finger structure, the robot includes a gripper, the gripper includes a gripper base and a finger 1, the finger 1 is connected to the gripper base through the quick-change finger structure, and the quick-change finger structure includes a connecting block 2 and the slider 3, the connecting block 2 is detachably connected to the base of the gripper, the connecting block 2 is provided with a counterbore 21 that penetrates up and down, and the connecting block 2 is connected to the base of the gripper through the counterbore 21 through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More