

Bionic quadruped spider robot
A spider robot and frame technology, applied in the field of robotics, can solve the problems of wheeled mechanical structure walking difficulties, affecting normal work, body balance robot rollover, etc., to achieve high torque transmission efficiency, small rotation damping, and wide field of view Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with specific examples, but the present invention is not limited to these specific implementations. Those skilled in the art will realize that the present invention covers all alternatives, modifications and equivalents as may be included within the scope of the claims.
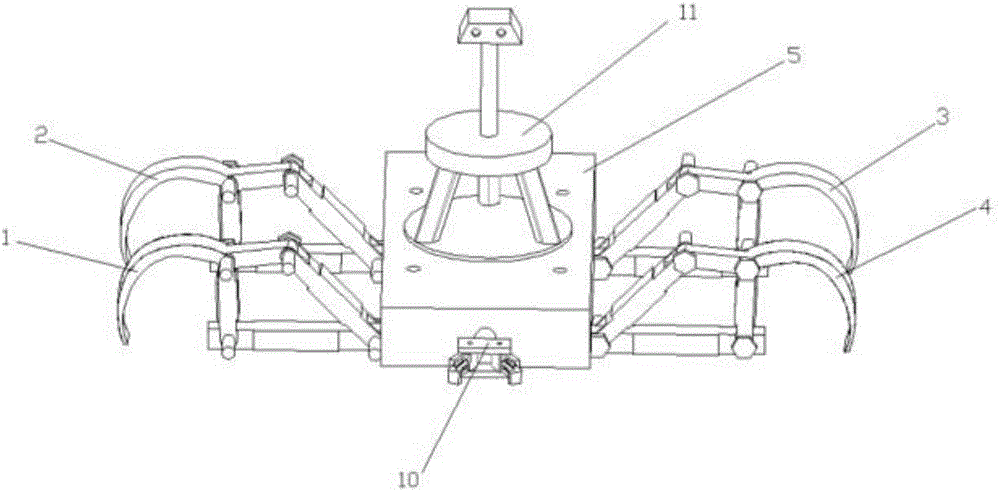
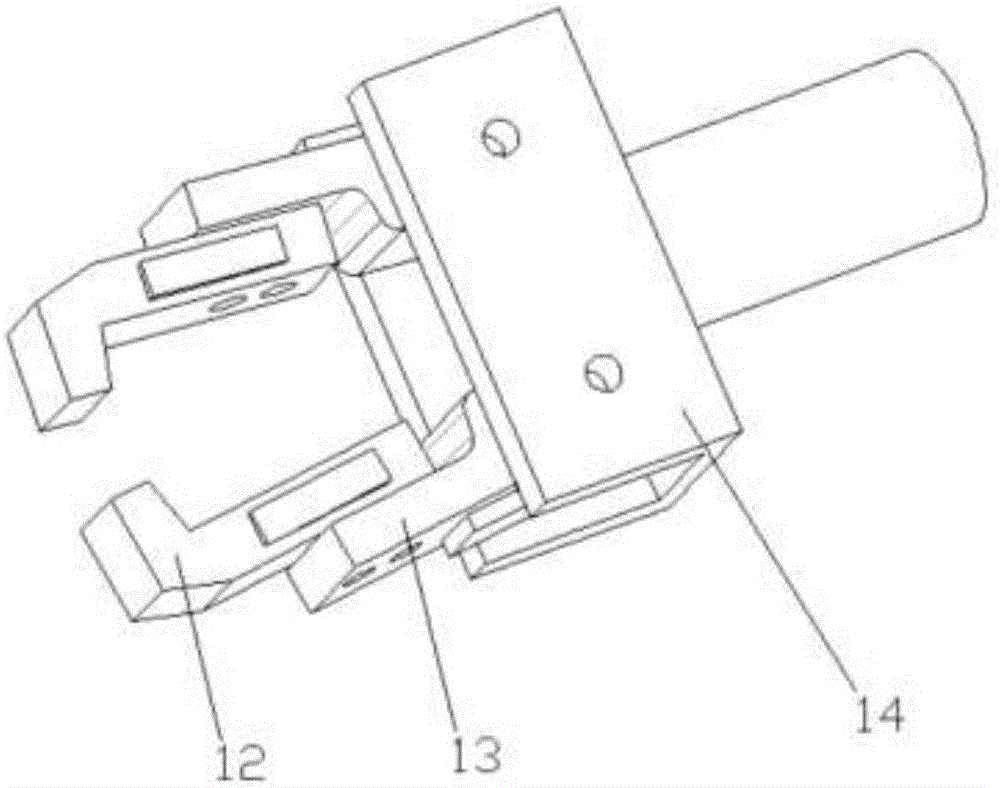
[0024] see Figure 1-5 , a bionic quadruped spider robot, including a body 5 as the body, two pairs of symmetrically arranged leg crawling mechanisms 1 and 4, 2 and 3 are arranged on both sides of the body 5, and the front side of the body 5 is provided with A mouth clamping device 10, a camera module 11 is provided in the middle of the body 5;
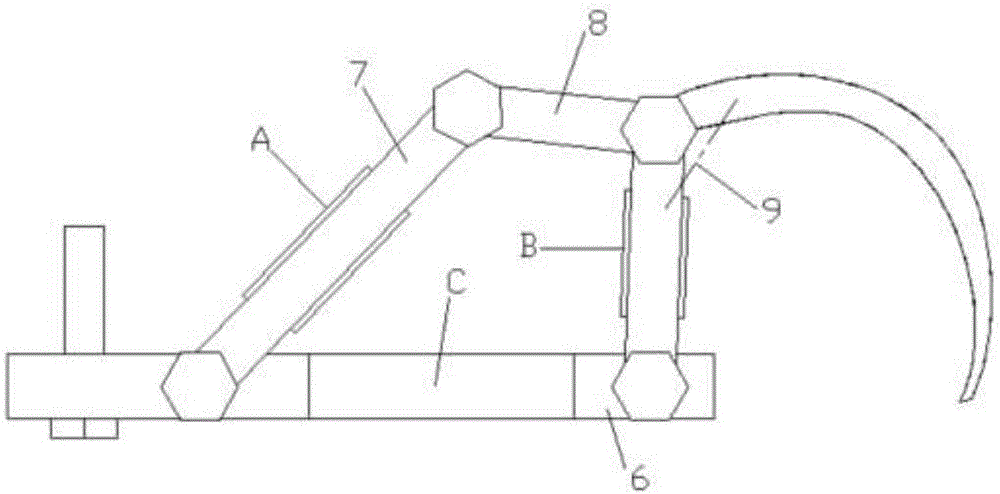
[0025] The leg crawling mechanism is a planar four-bar mechanism driven and linked by piezoelectric sheets, which includes a horizontally arranged frame rod 6 hinged on the body 5, and a vertical plane is hinged at the inner end of the frame rod 6 The outer end of the first connecting rod 7...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More