

Serial-parallel elastically driven linear movement unit
An elastic drive, linear motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of slow movement, poor impact resistance, unstable output, etc., to achieve stable output, increase support capacity, and increase load capacity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
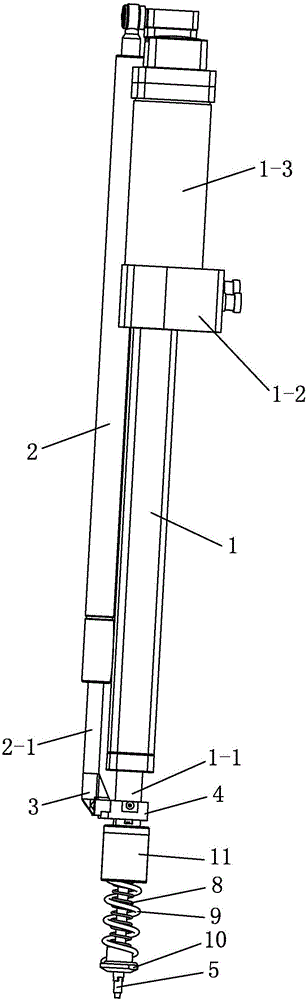
[0015] combine Figure 1-Figure 5 Explain that a series-parallel elastically driven linear motion unit of this embodiment includes an electric linear actuator 1, and it also includes a gas spring 2, a gas spring extension shaft connector 3, an actuator extension shaft connector 4, Shaft 5, sliding sleeve 6, upper thin spring 7, lower thin spring 8, lower thick spring 9 and lower spring fixing part 10;
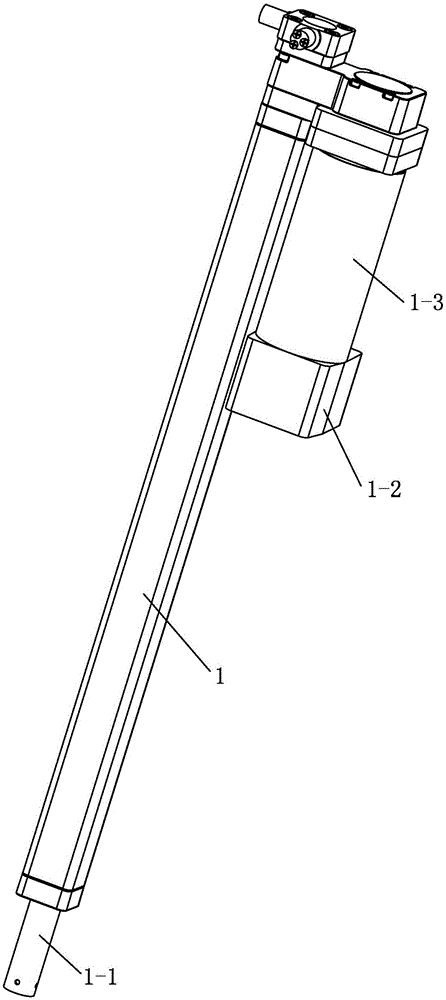
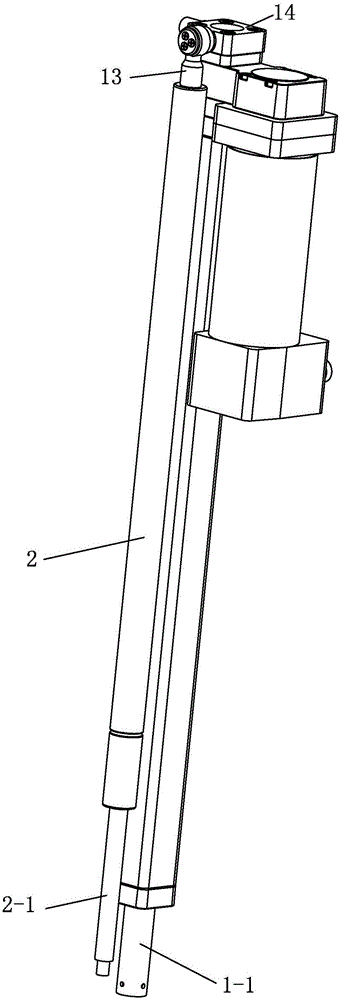
[0016] The top of the cylinder body of the electric linear actuator 1 is rotatably installed with the gas spring 2, and the gas spring extension shaft 2-1 of the gas spring 2 is connected with the actuator extension shaft 1-1 of the electric linear actuator 1. 1 are arranged in parallel, the actuator extension shaft 1-1 of the electric linear actuator 1 is a hollow cavity, the upper section of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More