

A bionic multi-navigation deep-sea unmanned submersible
A submersible, deep-sea technology, applied in underwater ships, underwater operation equipment, special-purpose ships, etc., can solve the problems of submarine target sampling, deep-sea unmanned submersibles cannot perform seabed walking, etc., and achieve the goal of precise location operations. Sampling function, the effect of function expansion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
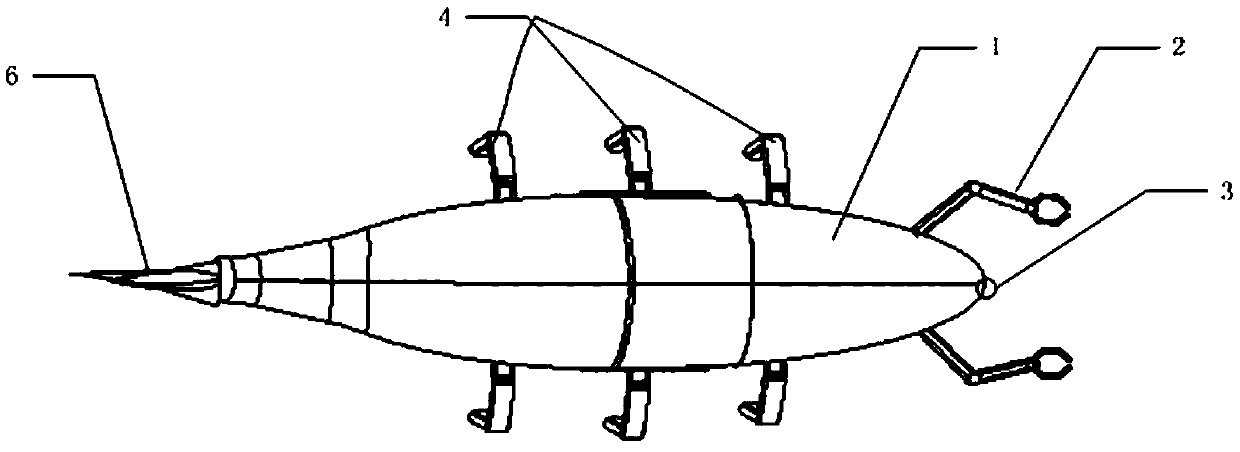
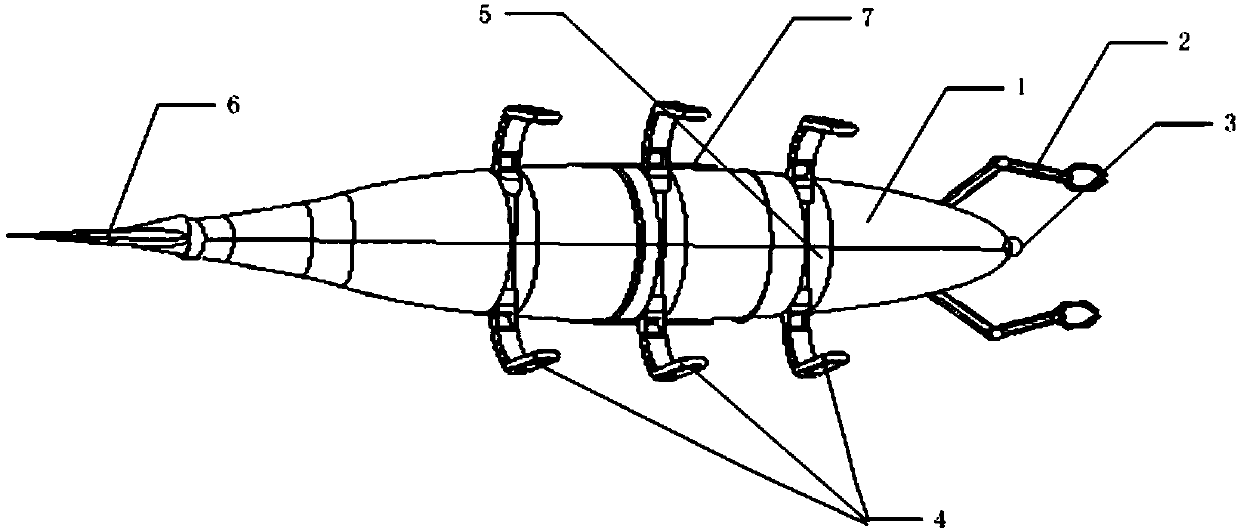
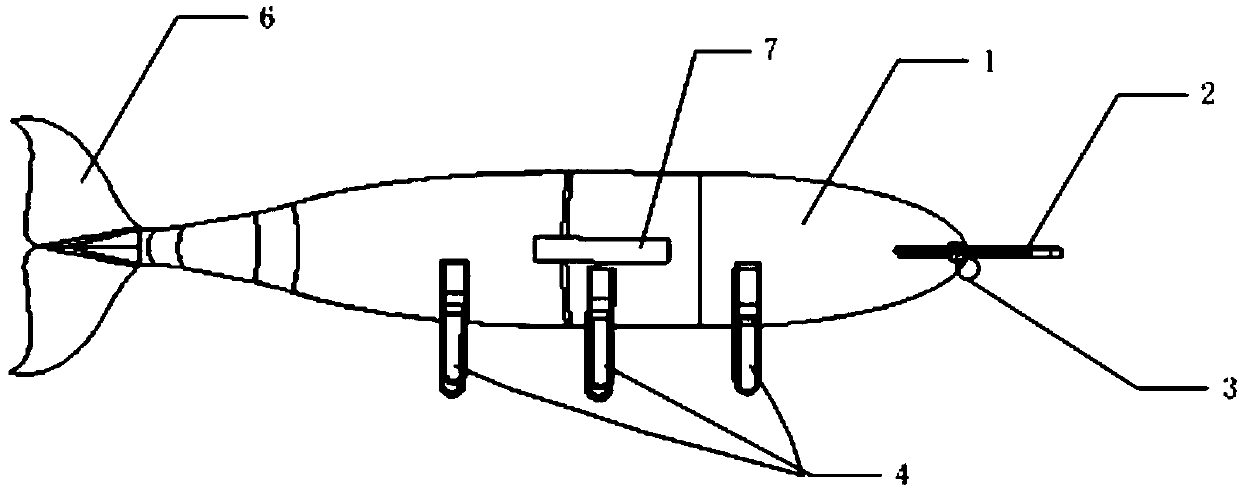
[0020] combine Figure 1 to Figure 3 , the present invention includes a deep-sea unmanned submersible body 1, a manipulator 2 (there are two openings at the end of the manipulator on both sides of the bow, and the manipulator can be stored in the deep-sea unmanned submersible through the opening after contraction), an underwater camera 3, Walking feet 4 (three groups in total, one group at the bow can be folded into a rudder), and on the bottom of the walking feet of the deep-sea unmanned submersible, there are three groups of grooves 5, tail fins 6, and side-scanning sonar 7. It can complete various navigation states: deep-sea navigation state, seabed walking state, and fixed-point operation state.
[0021] Each walking foot has three arms: No. 1 arm a, No. 2 arm b, and No. 3 arm c. Motors are installed at the joint joints: No. 2 mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More