Robot route planning method by employing improved convolutional neural network based on K mean value
A convolutional neural network and path planning technology, which is applied in the field of robot path planning based on K-means improved convolutional neural network, can solve the problems of large number of convolutional neural network parameters, gradient dispersion, and parameters that cannot be learned to optimal values. , to achieve fast training speed, improve accuracy, and solve the effect of gradient dispersion problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below in conjunction with specific embodiment, further illustrate the present invention. It should be understood that these examples are only used to illustrate the present invention and are not intended to limit the scope of the present invention. In addition, it should be understood that after reading the teachings of the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
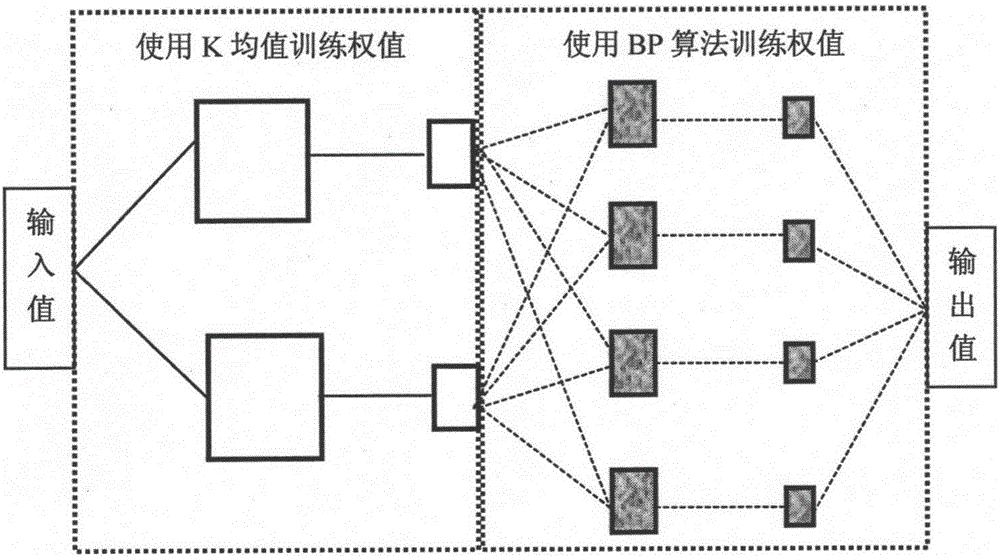
[0029] The invention provides a robot path planning method based on K-means improved convolutional neural network, which adopts weight sharing and local connection to reduce the number of parameters to be learned and improve efficiency.
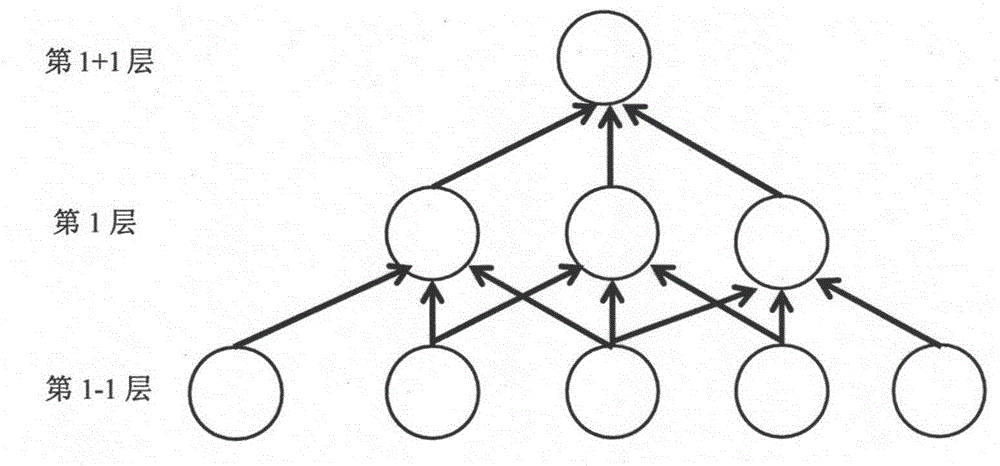
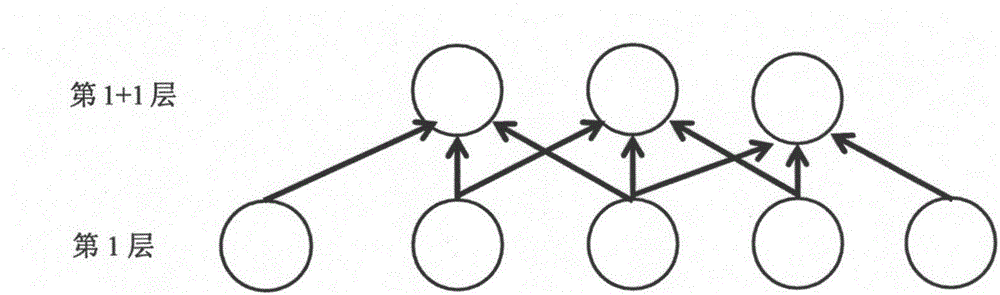
[0030] Such as figure 1 As shown, each layer uses local connection instead of full connection with the previous layer. The nerve cells in the first layer are connected to the three nerve cell...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



