

A three-branched six-degree-of-freedom parallel mechanism with arc-shaped moving pairs
A technology with three branches and degrees of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as high precision requirements, complicated branch chain forms, and small working space, and achieve increased operating space and simple and reliable structure , the effect of smooth motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with the embodiments and the accompanying drawings, but this should not be used as a limitation to the protection scope of the claims of the present application.
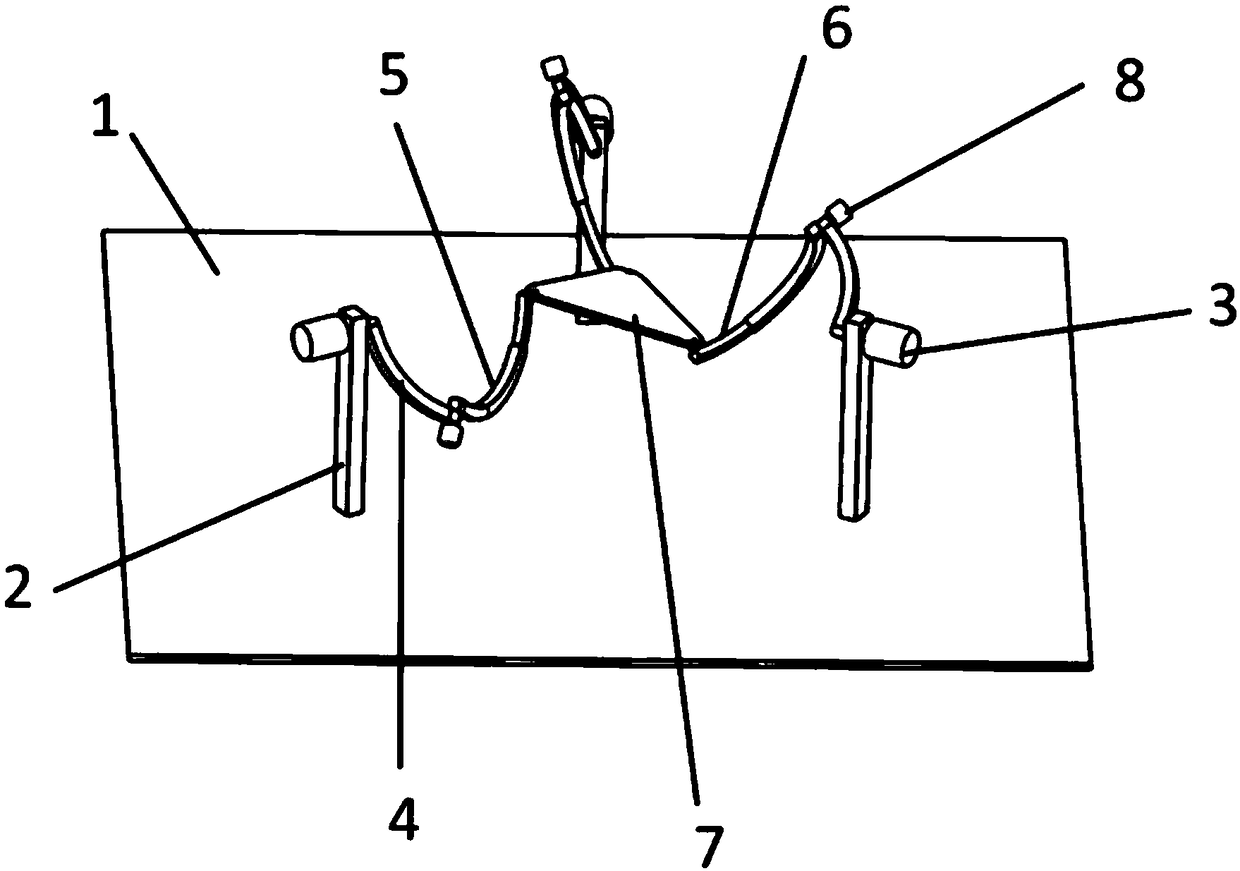
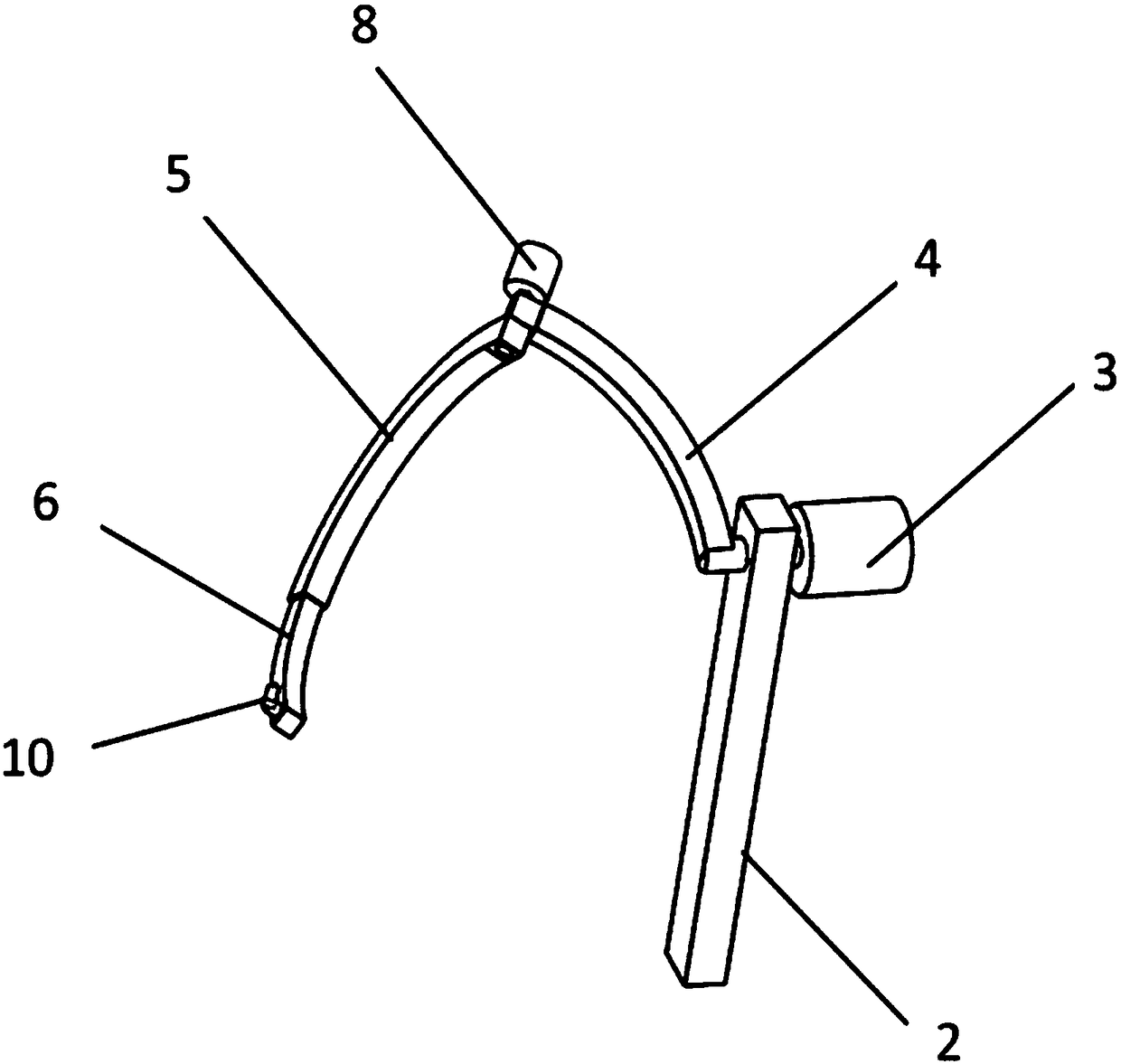
[0017] The present invention has three branches and six degrees of freedom parallel mechanism with arc-shaped moving pairs (referred to as mechanism or parallel mechanism, see Figure 1-3 ) includes a fixed platform 1, a moving platform 7 and three branch chains with the same structure, the three branch chains are installed between the moving platform and the fixed platform, and centered on the moving platform, they are evenly arranged on the fixed platform 7 along the circumferential direction;
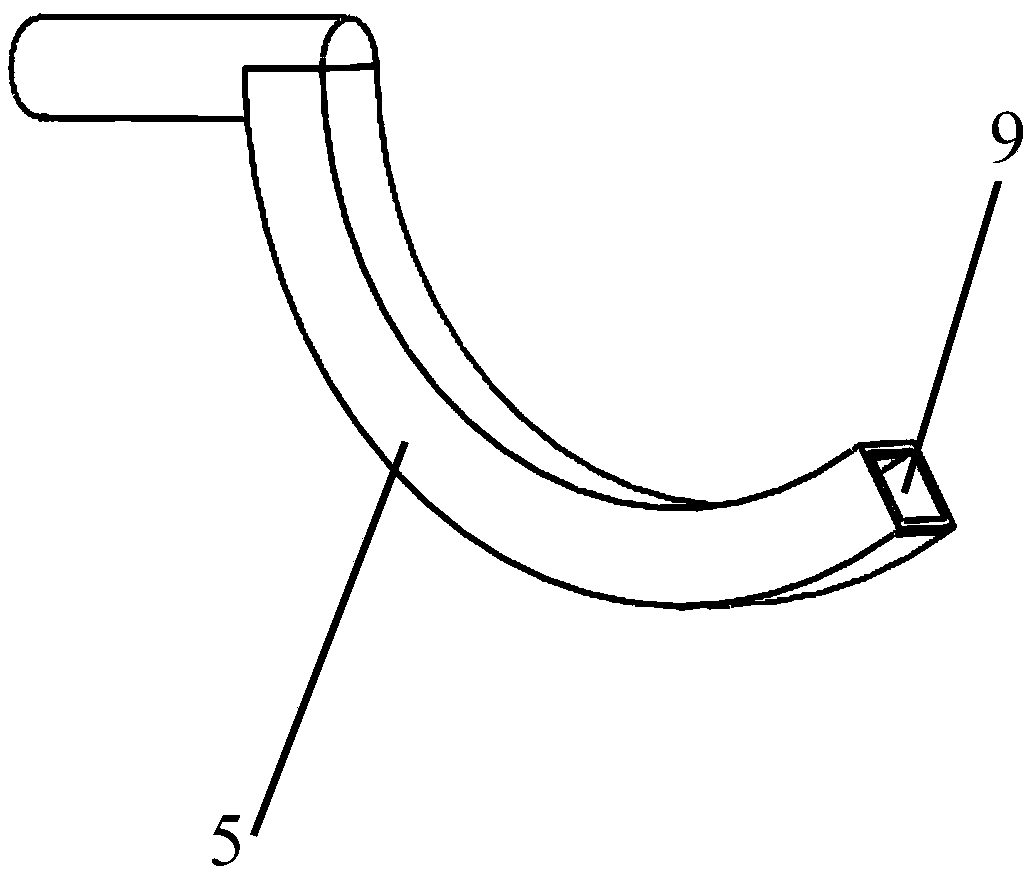
[0018] Each branch chain includes a support frame 2 and three arc-shaped connecting rods (i.e., the rear section arc-shaped connecting rod 4, the middle section arc-shaped connecting rod 5 and the front section arc-shaped connecting rod 6)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More