

Control method for steer-by-wire automobile active front-wheel steering control system
An active front wheel steering and control system technology, applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve the problems of local minimum points, slow convergence speed of BP network control, etc., to ensure safety and improve vehicle performance. The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the following embodiments in no way limit the present invention.
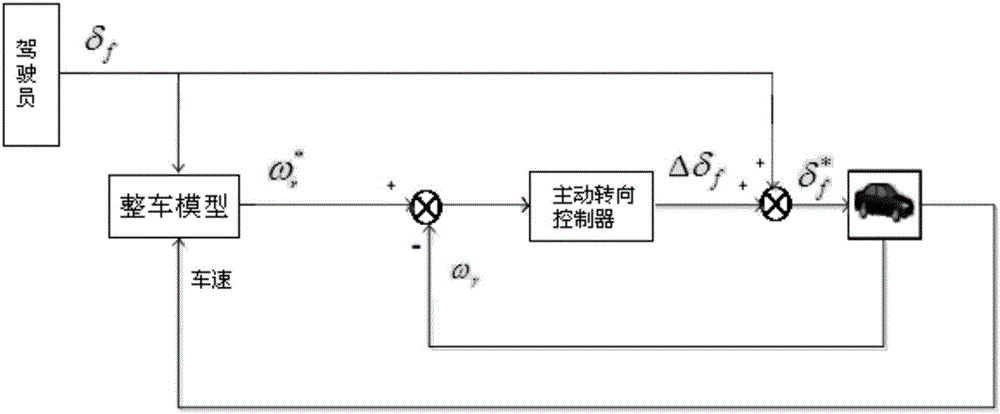
[0025] Such as figure 1 As shown in -4, the control method for the active front wheel steering control system of a steer-by-wire vehicle, the active front wheel steering control system of a steer-by-wire vehicle includes an active steering controller, a steering wheel, a vehicle front wheel steering actuator, CAN bus transceiver, one end of the CAN bus transceiver is connected to the active steering controller, and the other end is connected to the CAN bus of the car; the steering wheel is directly connected to the active steering controller; one end of the steering actuator of the front wheel of the car is connected to the steering mechanism of the car, and the other end One end is connected to the active steering controller; the control method for the active front wheel stee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More