

A dynamic platform mechanism of ball screw series rack and pinion type
A technology of rack and pinion and ball screw, which is applied in the field of robotics, can solve the problems of limited application range and inflexible movement of the movable platform, and achieve the effect of small deflection angle and large deflection angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with accompanying drawing:
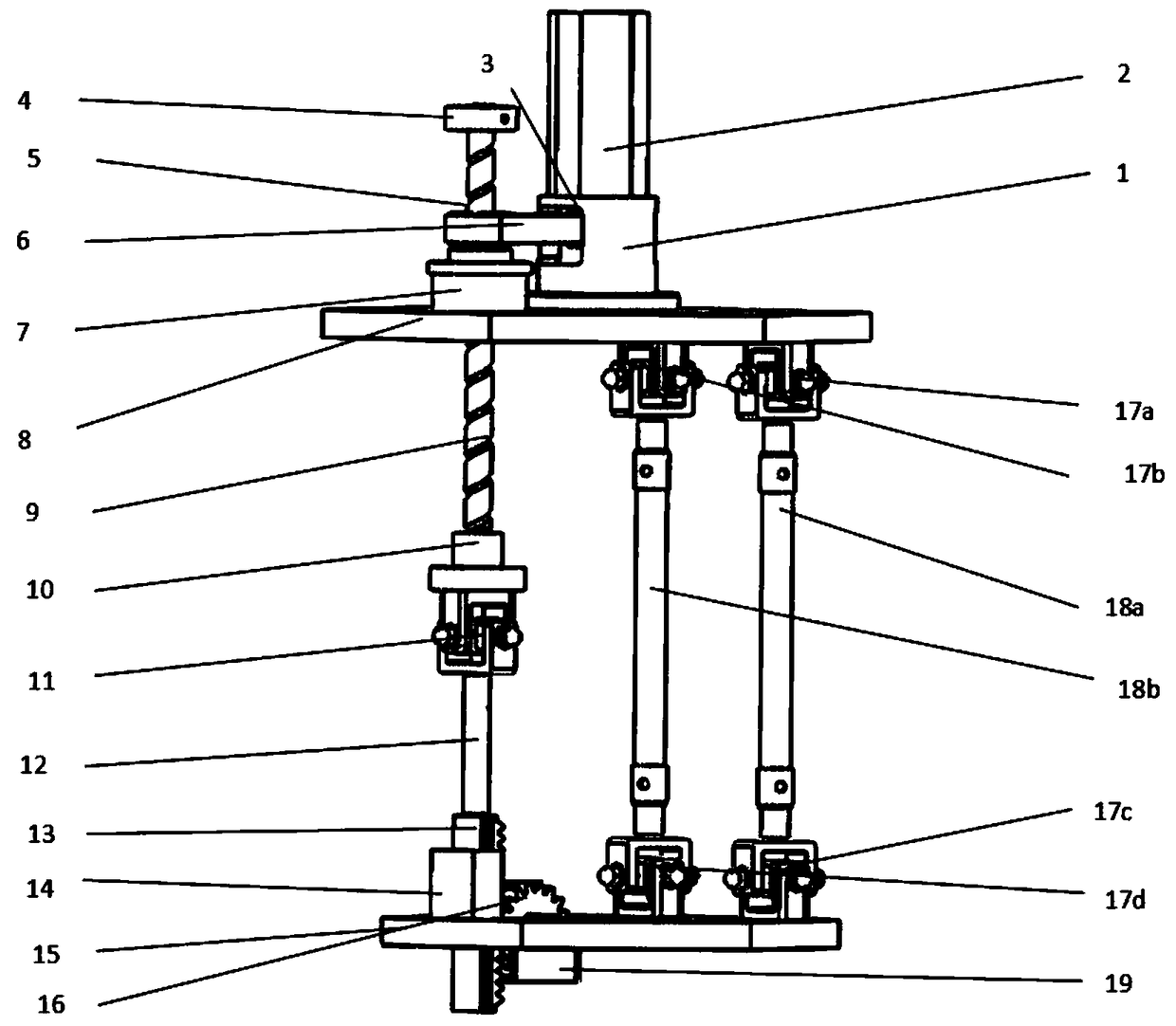
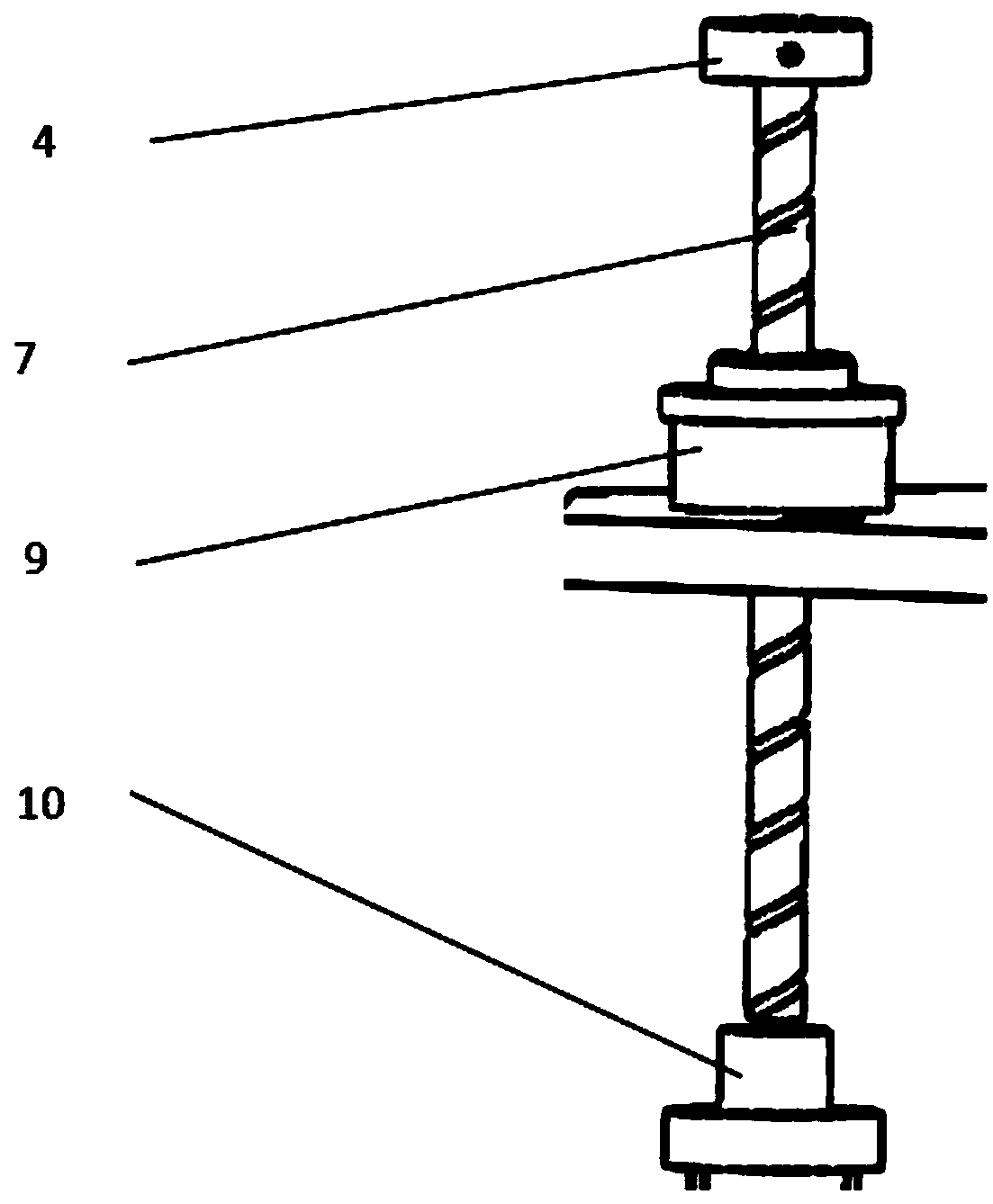
[0017] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, a ball screw type moving platform mechanism includes a synchronous belt mechanism, a ball screw mechanism, a rack and pinion mechanism, an upper moving platform, a lower moving platform, a moving platform connecting rod, etc., and the upper and lower moving platforms, the screw and the gear The bar connecting rod and the moving platform connecting rod form a closed-loop mechanism, and the lengths of the two moving platform connecting rods are the same.
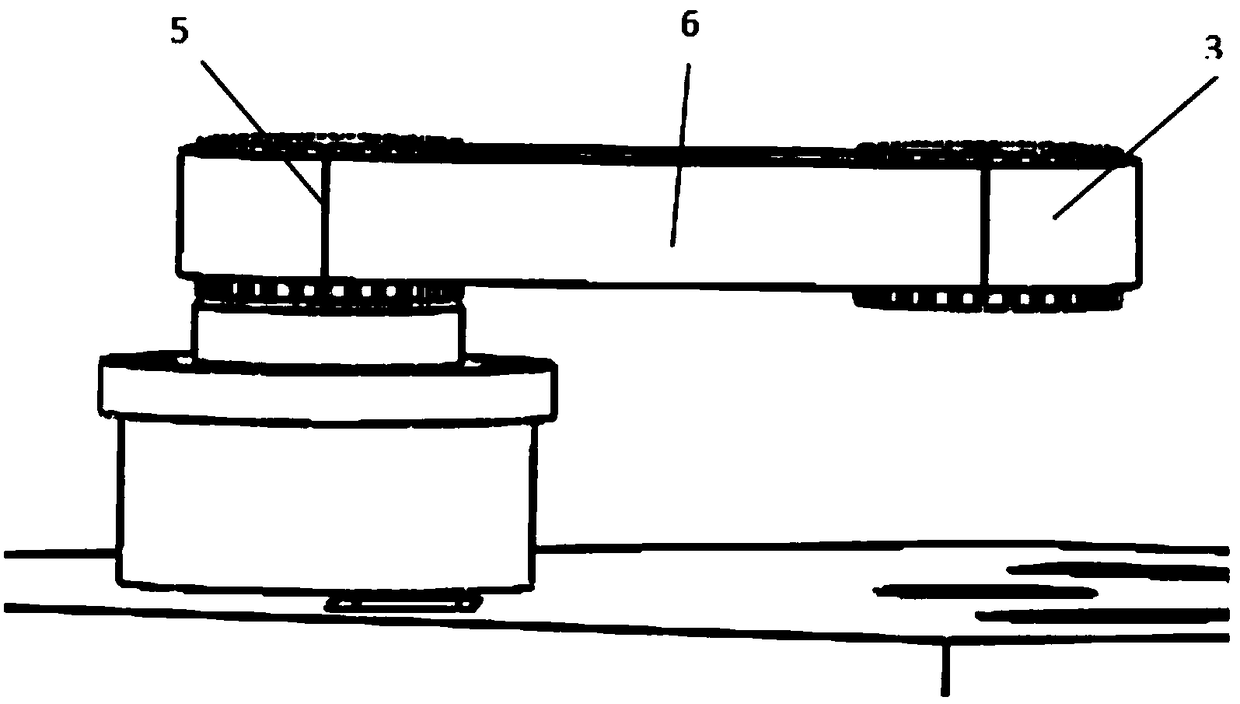
[0018] Such as figure 1 , figure 2 , image 3 As shown, the synchronous belt pulley 5 is connected to the inner ring of the lead screw nut 7, the axes of the synchronous belt pulley 3 and the synchronous belt pulley 5 are parallel and the end faces are on the same plane parallel to the upper moving platform 8, and the synchronous belt mechanism is d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More