Map matching and locating method and system based on particle filter
A technology of map matching and particle filtering, applied in the directions of measuring devices, instruments, mapping and navigation, etc., can solve problems such as poor positioning accuracy, and achieve the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
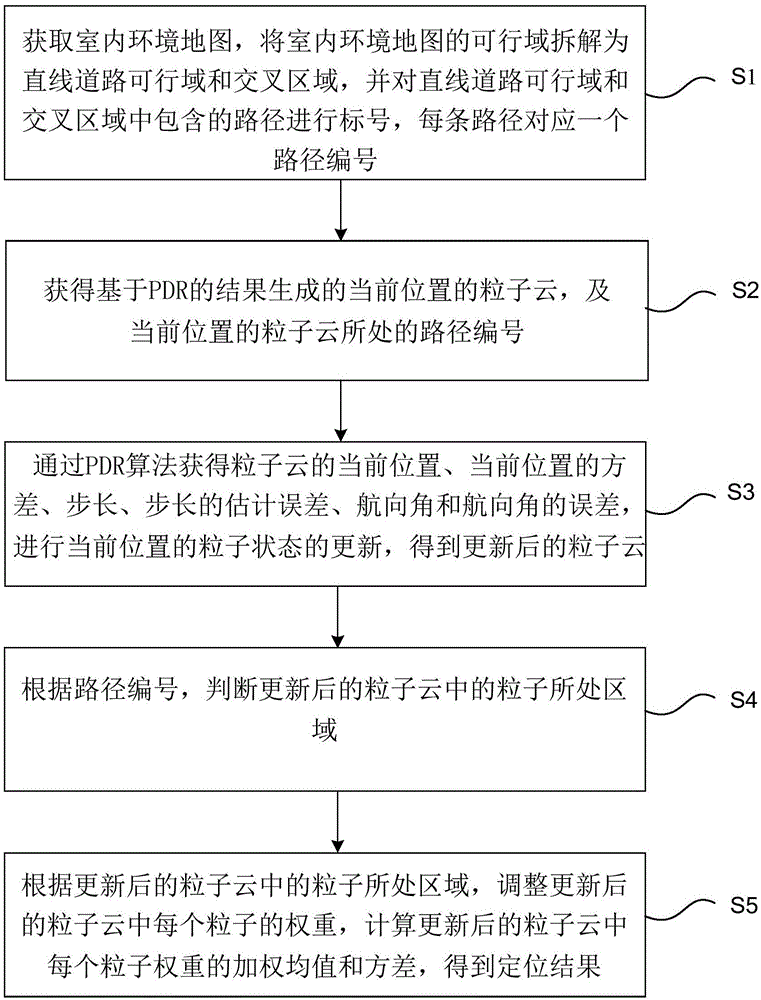
[0062] figure 1 It shows a flow chart of a particle filter-based map matching and positioning method provided by the first embodiment of the present invention; figure 1 As shown, Embodiment 1 of the present invention provides a particle filter-based map matching and positioning method, including:
[0063] Step S1, obtain the indoor environment map, disassemble the feasible region of the indoor environment map into the feasible region of the straight road and the intersection region, and label the paths contained in the feasible region of the straight road and the intersection region, and each path corresponds to a path number;
[0064] Step S2, obtaining the particle cloud at the current position generated based on the result of the PDR, and the path number of the particle cloud at the current position;
[0065] Step S3, obtain the current position of the particle cloud, the variance of the current position, the step size, the estimation error of the step size, the heading an...
Embodiment 2
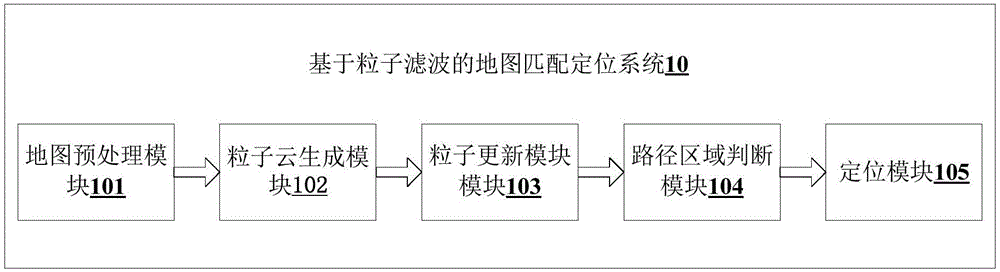
[0097] figure 2 It shows a schematic diagram of a particle filter-based map matching and positioning system provided by the second embodiment of the present invention, as shown in figure 2 As shown, Embodiment 2 of the present invention provides a particle filter-based map matching and positioning system 10, including:
[0098] The map preprocessing module 101 is used to obtain the indoor environment map, decompose the feasible region of the indoor environment map into the feasible region of the straight road and the intersection region, and label the paths contained in the feasible region of the straight road and the intersection region, each path corresponds to a path number;
[0099] The particle cloud generation module 102 is used to obtain the particle cloud at the current position generated based on the result of the PDR, and the path number where the particle cloud at the current position is located;
[0100] The particle update module 103 is used to obtain the curr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More