

Path conflict resolution method for multiple automatic guided vehicles in automated container terminal
An automated guidance, vehicle routing technology for vehicle position/route/altitude control, motor vehicles, transportation, and packaging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
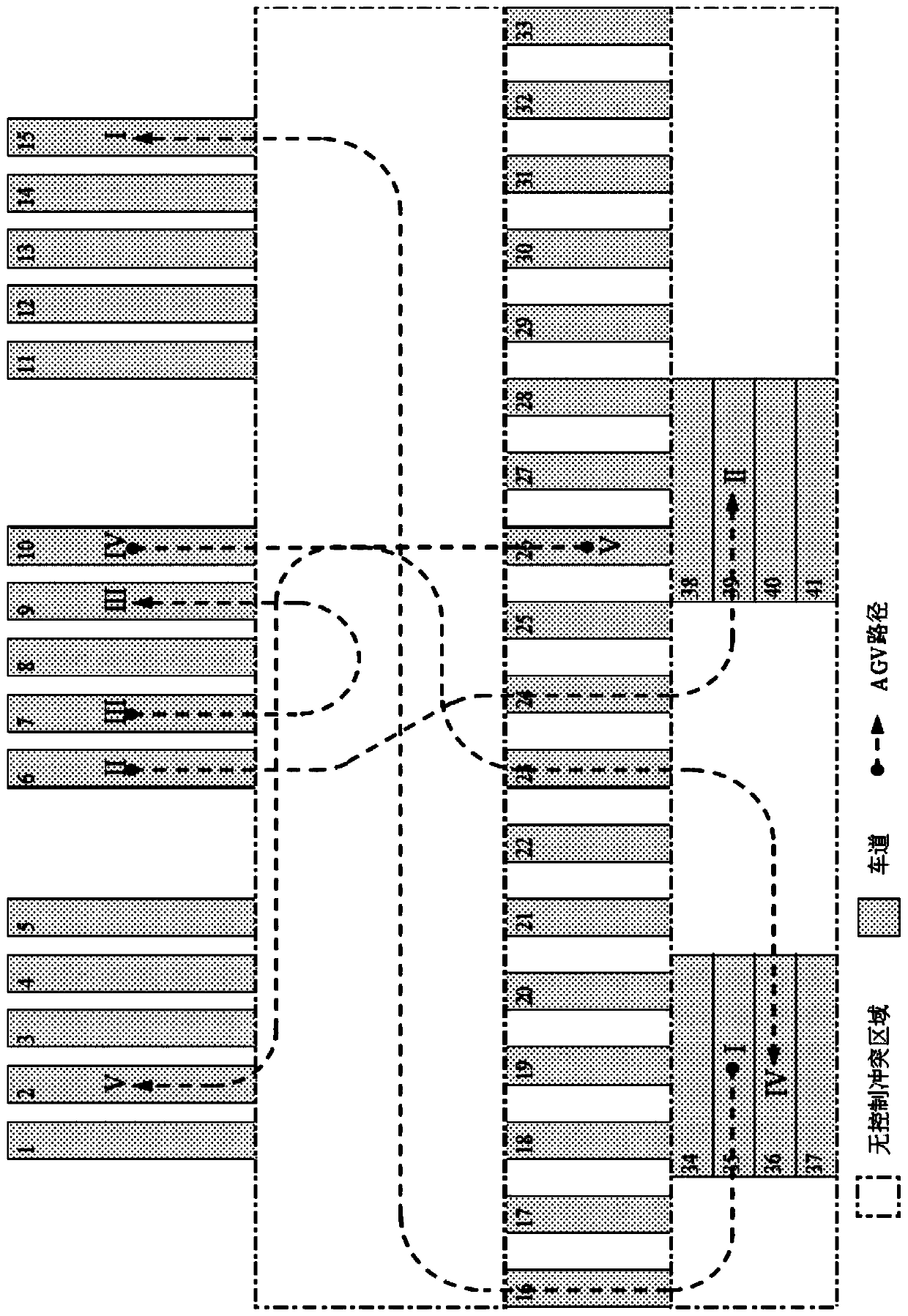
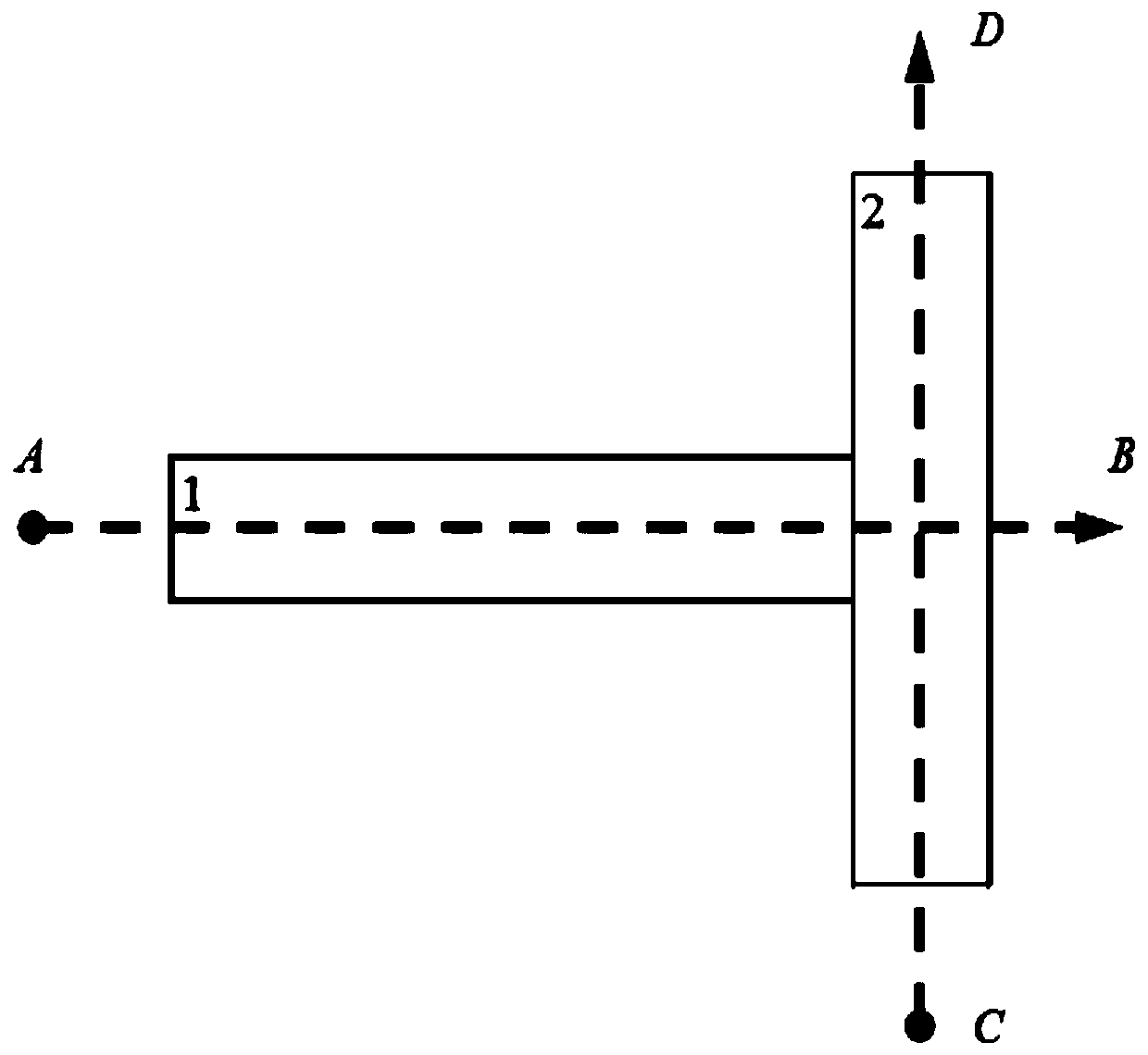
[0158] Taking the process of two AGVs performing their respective transportation tasks as an example, the path conflict resolution method proposed by the present invention is described below, as Figure 11 to Figure 16 shown. The time points of each scene in the figure are after the dynamic division is completed and before the allowable length is updated. In the figure, A and B are used to mark the intersection of the path; a large dot is used to represent the feature point farthest from the starting point in the subset of occupied points, and R is used to mark I and R II To distinguish; the feature point farthest from the starting point in the application point subset is represented by a big diamond, and marked with C I and C II Make a distinction. The meanings of other symbols in the figure are the same as figure 1 in the same.
[0159] Figure 11 Among them, the path planning of No. I AGV has been completed, the starting point of the path is in lane 10, the end point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More